Побудова моделі автоматичної системи управління технологічним процесом
Екзогенні змінні: інтервали надходження заявок, час обробки даних, інтервал між посилкою керуючих сигналів, час підключення резервного комп’ютера, час відновлення основного комп’ютера, інтервал між відмовами основного комп’ютера. Ендогенні змінні: середня кількість пропущених даних nпроп, середній час знаходження технологічного процесу в загальмованому стані tзаг. Оскільки процеси, що… Читати ще >
Побудова моделі автоматичної системи управління технологічним процесом (реферат, курсова, диплом, контрольна)
Зміст.
- Вступ
- 1. Опис об'єкта та постановка задачі моделювання
- 2. Розробка концептуальної моделі та її формалізація
- 3. Моделювання як метод аналізу об'єктів
- 4. Опис моделювального алгоритму
- 5 Планування машинного експерименту
- Висновки
- Перелік посилань
Вступ.
В широкому сенсі інформаційна система є практично на будь-якому підприємстві. Інформаційні системи можуть виконувати різні функції. Для оптимізації роботи таких систем необхідно змоделювати їх роботу для оцінки їх працездатності, продуктивності, а також для виявлення параметрів, необхідних для поліпшення характеристик.
Комп’ютерне моделювання знайшло практичне застосування у всіх сферах діяльності людини, починаючи від моделей технічних, технологічних і організаційних систем і закінчуючи проблемами розвитку людства і всесвіту. Комп’ютерне моделювання використовують, перш за все, для прийняття рішень. Модель дозволяє програвати будь-які ситуації і отримувати найбільш ефективні рішення проблеми. Більш докладно питання актуальності використання математичного моделювання описано в та.
З усіх видів моделювання імітаційне моделювання є чи не найпопулярнішим засобом, використовуваним на практиці для цих цілей. Основна його цінність полягає в застосуванні методології системного аналізу.
Програмні засоби імітації у своєму розвитку змінювалися протягом кількох поколінь, починаючи з мов моделювання і засобів автоматизації конструювання моделей до генераторів програм, інтерактивних та інтелектуальних систем, розподілених систем моделювання. Основне призначення всіх цих коштів — зменшення трудомісткості створення програмних реалізацій імітаційних моделей і експериментування з моделями.
Мета роботи — побудова моделі АСУ ТП та визначення кількості пропущених через відмову даних та часу знаходження системи в загальмованому стані.
модель комп’ютерна управління алгоритм.
1. Опис об'єкта та постановка задачі моделювання.
Завдання на курсову роботу формулюється наступним чином.
Для забезпечення надійності АСУ ТП в ній використовується два комп’ютери. Перший комп’ютер виконує обробку даних про технологічний процес та виробляє керуючі сигнали, а другий знаходиться в «гарячому резерві». Дані в комп’ютер надходять через 10±2 с, обробляються протягом 3с, потім посилається керуючий сигнал, що підтримує заданий темп процесу. Якщо до моменту посилки наступного набору даних не отриманий керуючий сигнал, то інтенсивність виконання технологічного процесу зменшується в два рази і дані посилаються з інтервалом 20±4 с. Основний комп’ютер кожні 30 с відсилає резервному комп’ютеру сигнал про свою працездатність. Відсутність сигналу означає необхідність ввімкнення резервного комп’ютера замість основного. Характеристики обох комп’ютерів однакові. Підключення резервного комп’ютера займає 5с, після чого він замінює основний до відновлення, а процес повертається до нормального темпу. Відмови комп’ютера відбуваються через 300±30 с. Відновлення займає 100 с. Вважати резервний комп’ютер абсолютно надійним.
Змоделювати 8 годин роботи системи. Визначити середній час знаходження процесу в заторможеному стані та середнє число пропущених через відмову даних.
2. Розробка концептуальної моделі та її формалізація.
Для полегшення розробки моделюючого алгоритму необхідно визначити можливі стани системи. Так в наведеній системі можуть мати місце наступні ситуації:
система знаходиться в нормальному стані: основний комп’ютер обробляє дані, технологічний процес проходить в нормальному темпі;
технологічний процес знаходиться в нормальному стані, основний комп’ютер відмовив, а резервний ще не отримав сигнал про ввімкнення або ще не підключився, в такому випадку дані, що надходять на вхід системи втрачаються;
технологічний процес знаходиться в загальмованому стані, основний комп’ютер відмовив, а резервний ще не отримав сигнал про ввімкнення або ще не підключився, в такому випадку дані, що надходять на вхід системи втрачаються;
технологічний процес проходить в загальмованому темпі, дані обробляє резервний комп’ютер, основний комп’ютер відновлюється;
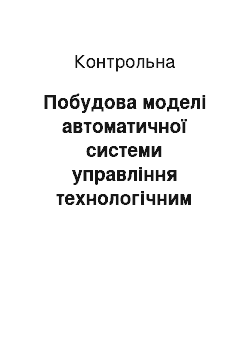
Спираючись на дані, наведені в умові та на приведені вище тези можемо побудувати концептуальну модель системи. (Рисунок 2.1).
Рисунок 2.1 — Концептуальна модель АСУ ТП.
Відсутні дані щодо часу зміни резервного комп’ютера основним після відновлення останнього. Тому будемо вважати його рівним 0, тобто зміна комп’ютера відбувається миттєво. Також приймемо наступні твердження: інформація, обслуговування якої було перервано через відмову головного комп’ютера будемо вважати втраченою, а інформація, що знаходиться в резервному комп’ютері в момент підключення головного комп’ютера обробляється резервним комп’ютером до кінця.
Екзогенні змінні: інтервали надходження заявок, час обробки даних, інтервал між посилкою керуючих сигналів, час підключення резервного комп’ютера, час відновлення основного комп’ютера, інтервал між відмовами основного комп’ютера. Ендогенні змінні: середня кількість пропущених даних nпроп, середній час знаходження технологічного процесу в загальмованому стані tзаг. Оскільки процеси, що відбуваються в системі носять стохастичний характер, найбільш доцільно для отримання достовірної моделі скористатися методами імітаційного моделювання. Для спрощення розробки моделі побудуємо Q-схему.
Рисунок 2.2 — Q-схема розроблюваної моделі.
Шукана величина nпроп буде являти собою кількість даних, що не пройшли обслуговування ні в основному, ні в резервному комп’ютерах.
nпроп = nзген — nосн — nрез (2.1).
де nзген — кількість даних, що потрапили на вхід системи; nосн — кількість даних, оброблених основним комп’ютером; nрез - кількість даних, оброблених резервним комп’ютером. Шукана величина tзаг буде являти собою суму довжин всіх моментів часу, в яких технологічний процес знаходиться в загальмованому стані.
3. Моделювання як метод аналізу об'єктів.
Моделюванням називають процес побудови найкращої у певному сенсі моделі та маніпулювання з нею з метою отримання результатів щодо дослідження.
Під математичною моделлю розуміють сукупність математичних співвідношень що описують математичний процес або явище.
Математичне моделювання буває:
аналітичне;
імітаційне;
Аналітичне моделювання являє собою процес функціонування системи у вигляді деяких функціональних співвідношень або логічних умов.
Імітаційне моделювання — метод дослідження, який базується на тому, що динамічна система, яка вивчається, замінюється її імітатором, з яким проводять дослідження з метою отримання інформації про досліджувану систему.
Імітаційне моделювання широко використовується для моделювання систем масового обслуговування, оскільки змоделювати стохастичні процеси, що відбуваються там за допомогою аналітичного моделювання досить важко.
Однією з перших мов моделювання, що полегшують процес написання імітаційних програм, була мова GPSS, створена у вигляді кінцевого продукту Джеффрі Гордоном в фірмі IBM в 1962 р. Нині є транслятори для операційних систем DOS — GPSS / PC, для OS / 2 і DOS — GPSS / H і для Windows — GPSS World. Більш детально ознайомитися з можливостями та особливостями мови можна в. Вивчення цієї мови і створення моделей дозволяє зрозуміти принципи розробки імітаційних програм і навчитися працювати c імітаційними моделями.
4. Опис моделювального алгоритму.
Оскільки в даній системі мають місце явища обробки заявок, що надходять на ЕОМ, а деякі процесси (надходження заявок, відмови основної ЕОМ) носять стохастичний характер та розроблена Q-схема, що описує функціонування системи в рамках неперервно-стохастичного підходу, для побудови імітаційної моделі використовувати мову GPSS (General Purpose Simulating System). Процес переходу від Q-схеми до програми описаний в. Для побудови моделюючої програми розроблена блок-діаграма, зображена на рисунку 4.1.
Рисунок 4.1 — Блок-діаграма моделі процесу.
Так для моделювання процесів, що відбуваються в системі доцільно використовувати три основні потоки транзактів, які будуть імітувати:
потік даних, що надходять з технологічного процесу;
сигнали, що свідчать про працездатність основного комп’ютера;
відмови основного комп’ютера;
Також наявні два допоміжні потоки заявок, один з яких використовується для вимірювання часу простою, а інший — для задання часу моделювання.
5. Планування машинного експерименту.
Для отримання інформації щодо моделі був виконаний двадцятикратний прогін моделі. Результати для 20 прогонів моделі занесені до таблиці 5.1.
Таблиця 5.1 — Результати досліджень.
Номер експерименту. | nзген, шт. | nосн, шт. | nрез, шт. | nпроп, шт. | tзаг, хв. | |
24.65. | ||||||
24.5. | ||||||
25.133. | ||||||
23.6. | ||||||
22.083. | ||||||
25.467. | ||||||
23.917. | ||||||
22.9. | ||||||
25.1. | ||||||
21.6. | ||||||
23.833. | ||||||
23.533. | ||||||
22.683. | ||||||
23.117. | ||||||
25.217. | ||||||
25.467. | ||||||
23.633. | ||||||
24.333. | ||||||
24.983. | ||||||
Згідно з математичне очікування кількості пропущених даних обчислюється за формулою:
(5.1).
де nпропі — кількість пропущених заявок в і-тій реалізації алгоритму Математичне очікування часу знаходження процесу в загальмованому стані обчислюється за формулою:
(5.2).
де tзагі — час знаходження процесу в загальмованому стані в і-тій реалізації алгоритму Дисперсія для кількості пропущених даних розраховується за формулою:
(5.3).
Дисперсія для часу знаходження процесу в загальмованому стані розраховується за формулою:
(5.4).
Підставивши значення із таблиці 5.1 в формули 5.1 — 5.4 отримаємо наступні результати:
Таким чином, маючи дані про дисперсію досліджуваних величин ми можемо обчислити похибки, щоб перевірити, чи не перевищують вони заданої. Похибка обчислюється за формулою:
(5.5).
де tp — табличний коефіцієнт, що відповідає заданій достовірності результа-тів. Для достовірності 0,95 значення коефіцієнту tp = 1,96;
у — середньоквадратичне відхилення;
Підставивши в формулу 5.5 отримані раніше дані, отримаємо:
Так похибка визначення часу знаходження процесу у загальмованому стані менша, ніж допустима величина (е = 0,5). Похибка визначення кількості пропущених через відмову даних перевищує допустиму величину більше, ніж в 4 рази. Визначимо кількість реалізацій, які потрібні для того, щоб отримати задовільну похибку. Формула для визначення необхідної кількості прогонів моделі:
N = ta2у2/е2 (5.6).
Підставивши в формулу (4.6) значення, отримані раніше, отримаємо необхідну кількість реалізацій:
N = 3,966*28,448/0,25 = 452.
Таким чином мінімальна необхідна кількість реалізацій — 452.
Висновки.
В ході виконання курсової роботи була розроблена імітаційна модель автоматизованої системи управління технологічним процесом, що обробляє дані про виробничий процес. Були послідовно проведені всі кроки для розробки та створення якісної моделі згідно з. Реалізація моделі виконана за допомогою мови імітаційного моделювання GPSS. Після проведення експериментів з даною моделлю можна зробити наступні висновки.
Середнє значення кількості пропущених даних складає близько 200 шт., що, в свою чергу становить 7% від загальної маси отриманих даних. При середньому значенні часу, проведеного в загальмованому стані, рівному 23,987 (що дорівнює приблизно 5%) продуктивність технологічного процесу буде складати 97,5% від максимального значення. Таке зниження продуктивності в більшості застосувань не буде мати значного впливу. Набагато небезпечніша втрата даних, оскільки останні використовуються не тільки для моніторингу стану технологічного процесу, а й для автоматизованого або автоматичного контролю процесу. Для деяких застосувань (процеси в харчовій або добувній промисловості, в галузі агротехніки), втім існує досить багато галузей, для яких такі втрати даних або зміна темпу технологічного процесу є недопустимими і виникає необхідність прийняття заходів щодо покращення характеристик системи.
Існує низка заходів для підвищення якості системи. Найпростіший та найдешевший з них — це зменшення інтервалу часу, який визначає частоту відсилки головним комп’ютером резервному сигналу про свою працездатність. Більш дорогим способом можна вважати використання більш надійного основного комп’ютера, відмови якого трапляються рідше. Врешті-решт найменший ефект матимуть заходи, направлені на зменшення часу підключення резервного комп’ютера, оскільки час підключення комп’ютера значно менший за час, який технологічний процес перебуває в загальмованому стані.
Перелік посилань.
1. Конспект лекцій з дисципліни «Математичне моделювання» для студентів напряму підготовки 6.50 201 — «Системна інженерія» / Упоряд. В. В. Безкоровайний. — Харків: ХНУРЕ, 2010. — 116 с.
2. Томашевський В. М. Моделювання систем. — К.: Видавнича група BHV, 2005. — 352 с.
3. Кудрявцев Е. М. GPSS World. Основы имитационного моделирования различных систем: — М.: ДМК Пресс, 2004. — 320 с.
4. Советов Б. Я., Яковлев С. А. Моделирование систем. — М.: Высш. шк., 1985. — 271 с.
5. Методичні вказівки до курсової роботи з дисципліни «Математичне моделювання» для студентів спеціальності 6.50 201 — «Системна інженерія» /Упоряд. В. В. Безкоровайний. — Харків: ХНУРЕ, 2011. — 44 с.
6. ДСТУ 3008−95. Документація. Звіти в сфері науки і техніки. Структура і правила оформлення. — Державний стандарт України, 1995. — 36 с.