Визначення параметрів вимірювального перетворювача для системного датчика температури
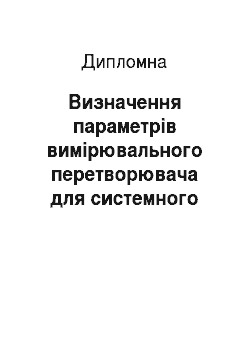
Рис. 3.1. Схема вимірювального перетворювача Для створення нелінійних ланок із заданою функцією перетворення найбільш ефективне застосування кусочно-лінійної апроксимації цієї функції. У цьому методі вихідну функцію представляють ламаної кривої, зменшуючи тим самим число точок характеристики, значення яких необхідно тримати в пам’яті обчислювального пристрою, відповідно при цьому зменшуються… Читати ще >
Визначення параметрів вимірювального перетворювача для системного датчика температури (реферат, курсова, диплом, контрольна)
Одеська державна академія технічного регулювання якості
Інститут заочно-дистанційного навчання Кафедра інформаційно-вимірювальних технологій Дипломна робота Визначення параметрів вимірювального перетворювача для системного датчика температури Студент групи 12 631міз Раков Андрій Володимирович
Календарний план перетворювач температура датчик лінеаризація
№з/п | Назва етапів дипломного проекту (роботи) | Строк виконання етапів проекту (роботи) | Примітка | |
Підбір матеріалу, обґрунтування розділів | ||||
Написання теоретичного розділу | ||||
Обґрунтування розділу досліджень | ||||
Підготовка слайдів та доповіді | ||||
Подача та узгодження роботи керівнику | ||||
Студент Раков А.В.
Керівник проекту (роботи) Лещенко О.І.
Зміст Вступ
1. Побудова графіка функції E = f (T) і прямої - ідеальної лінійної характеристики перетворення по температурі
2. Визначення максимальної в заданому діапазоні температури похибки не лінійності характеристики
3. Лінеаризація НСХ перетворювача
3.1 Технічне рішення щодо лінеаризації НСХ перетворювача
3.2 Автоматичне управлення параметрами первинних перетворювачів у складі інформаційно-вимірювальних систем
4. Вибір і обґрунтування принципу роботи вузла аналого-цифрового перетворення
4.1 Визначення часу перетворення вимірювального перетворювача
4.2 Структурна схема вимірювального перетворювача
4.3 Гальванічне розділення вхідних і вихідних кіл Висновки Список використаної літератури
Вступ Сучасна інформаційно-вимірювальна техніка має засобами вимірювання близько двохсот різних фізичних величин — електричних, магнітних, теплових, акустичних, механічних та ін. Переважна більшість цих величин в процесі вимірювання перетвориться в величини електричні, як найбільш зручні для передачі, посилення, математичної обробки і точного вимірювання. Тому в сучасній вимірювальній техніці знаходять широке застосування перетворювачі різного роду фізичних величин в електричні величини.
Температура є одним з найважливіших параметрів технологічних процесів. Вона володіє деяким и принциповими особливостями, що обумовлює необхідність застосування великої кількості методів і технічних засобів її вимірювання.
Одним з методів вимірювання температури є термоелектричний метод, заснований на строгій залежності термоелектрорушійної сили (термо-е.р.с.) Термоелектричного термометра (термопари) від температури.
Термопари широко застосовуються для вимірювання температур до 2500 °C в різних областях техніки і в наукових дослідженнях. Вони можуть використовуватися для вимірювання температури від -200°С, але в області низьких температур термопари отримали менше поширення.
Перетворення між аналоговими і цифровими величинами — основна операція в обчислювальних і керуючих системах, оскільки фізичні параметри, такі як температура, є аналоговими, а більшість практичних методів обробки, обчислення і візуального представлення інформації - цифровими. Шляхом перетворення в цифрову систему за допомогою АЦП, розташованого у джерела інформації, такої реально існуючої змінної, як температура, і відновлення того ж самого сигналу за допомогою ЦАП, розташованого в крайовому пристрої, реалізується високошвидкісна, малошумними, стійка і дешева система передачі даних на велику відстань.
Було розроблено безліч АЦП, щоб задовольнити широкому спектру вимог. Для деяких застосувань переважаючими параметрами є висока точність і стабільність перетворення, в інших випадках дуже велике значення має швидкість перетворення. Економічні міркування також впливають на вибір схеми перетворення. Проте простота конструкції зазвичай досягається ціною зменшення швидкості перетворення.
У зв’язку з тим, що зараз існує широкий вибір різних інтегральних схем, що поєднують в одному кристалі всі необхідні функціональні вузли для побудови високоякісних і ефективних систем обробки різних фізичних параметрів, то це дозволяє ввести цифрову обробку сигналів будь-якому розробнику, який її потребує.
У цій роботі представлений процес створення вимірювального перетворювача для датчика термопари. Розглянемо термопару ТХА (K).
Мета роботи — отримання характеристик датчиків вимірювання температури, отримання математичної моделі температурного перетворювача для системного використання температурних датчиків.
Для досягнення мети роботи:
— розглянуто способи автоматичного регулювання датчиками температури;
— знято характеристики та побудовано графік функції первинного перетворювача;
— визначено максимальні похибки нелінійності характеристики;
— досліджено та отримано математичну модель резистивного перетворювача температури.
1. Побудова графіка функції E = f (T) і прямої - ідеальної лінійної характеристики перетворення по температурі
Значення термо-е.р.с. в мВ при температурі вільного кінця 0 °C для термопари типу ТХА (К) (нікель-хром/нікель-алюміній) з інтервалом в 25 °C візьмемо з ГОСТ Р 8.585−2001 «Державна система забезпечення єдності вимірювань. Термопари. Номінальні статичні характеристики перетворення» таблиця 1.1.
Знайдемо рівняння ідеальної лінійної характеристики за формулою:
де приймемо за у1 і у2 відповідно Енач і Екон, а за х1 і х2 відповідно tнач і tкон.
;
;
;
Обчислимо значення ідеальної лінійної характеристики, прийнявши за х температуру робочого кінця термопари.
Занесемо значення залежності термо-е.р.с. термопари ТХА (К) від температури і значення ідеальної лінійної характеристики перетворення по температурі в таблицю 1.1 і підрахуємо значення похибки нелінійної характеристики.
Таблиця 1.1.
Залежності термо-е.р.с. термопари ТХА (К)
№ точки | Температура робочого кінця термопари, єС | Термо е.р.с., мВ, | Т. е. д. с., мВ, ідеальної прямої | Похибка нелінійної характеристики | |
0,000 | 0,000 | 0,000 | |||
1,000 | 1,008 | — 0,008 | |||
2,023 | 2,015 | 0,008 | |||
3,059 | 3,023 | 0,037 | |||
4,096 | 4,030 | 0,066 | |||
5,124 | 5,038 | 0,086 | |||
6,138 | 6,045 | 0,093 | |||
7,140 | 7,053 | 0,087 | |||
8,138 | 8,060 | 0,078 | |||
9,141 | 9,068 | 0,073 | |||
10,153 | 10,075 | 0,078 | |||
11,176 | 11,083 | 0,093 | |||
12,209 | 12,090 | 0,119 | |||
13,248 | 13,098 | 0,150 | |||
14,293 | 14,105 | 0,188 | |||
15,343 | 15,113 | 0,230 | |||
16,397 | 16,120 | 0,277 | |||
17,455 | 17,128 | 0,327 | |||
18,516 | 18,135 | 0,381 | |||
19,579 | 19,143 | 0,436 | |||
20,644 | 20,150 | 0,494 | |||
21,710 | 21,158 | 0,552 | |||
22,776 | 22,165 | 0,611 | |||
23,842 | 23,173 | 0,669 | |||
24,905 | 24,180 | 0,725 | |||
25,967 | 25,188 | 0,779 | |||
27,025 | 26,195 | 0,830 | |||
28,079 | 27,203 | 0,877 | |||
29,129 | 28,210 | 0,919 | |||
30,174 | 29,218 | 0,956 | |||
31,213 | 30,225 | 0,988 | |||
32,247 | 31,233 | 1,015 | |||
34,297 | 33,248 | 1,049 | |||
33,275 | 32,240 | 1,035 | |||
35,313 | 34,255 | 1,058 | |||
36,323 | 35,263 | 1,061 | |||
37,326 | 36,270 | 1,056 | |||
38,323 | 37,278 | 1,046 | |||
39,314 | 38,285 | 1,029 | |||
40,298 | 39,293 | 1,006 | |||
41,276 | 40,300 | 0,976 | |||
42,247 | 41,308 | 0,939 | |||
43,211 | 42,315 | 0,896 | |||
44,169 | 43,323 | 0,846 | |||
45,119 | 44,330 | 0,789 | |||
46,061 | 45,338 | 0,723 | |||
46,995 | 46,345 | 0,650 | |||
47,921 | 47,353 | 0,568 | |||
48,838 | 48,360 | 0,478 | |||
49,746 | 49,368 | 0,379 | |||
50,644 | 50,375 | 0,269 | |||
51,532 | 51,383 | 0,149 | |||
52,410 | 52,410 | 0,000 | |||
Побудуємо графіки залежності термо-е.р.с. термопари ТХА (К) від температури і ідеальної лінійної характеристики перетворення по температурі. Графік ідеальної лінійної характеристики показаний на рисунку 1.1.
Так як залежність термо-е.р.с. термоелектричного перетворювача від температури представлена у вигляді таблиці, то для розрахунків і побудови графіків скористаємося програмою Microsoft Excel.
Побудуємо графік відхилення термо-е.р.с. термопари ТХА (К) від ідеальної лінійної характеристики показано на рисунку 1.2.
Рис. 1.1. Графік ідеальної лінійної характеристики Рис. 1.2. Графік відхилення термо-е.р.с. термопари ТХА (К) від ідеальної лінійної характеристики З графіка видно, що максимальне значення відхилення термо-е.р.с. термопари від ідеальної лінійної характеристики 1,061 мВ.
2. Визначення максимальної в заданому діапазоні температури похибки не лінійності характеристики Нелінійність перетворювача — це відхилення від прямої лінії, проведеної через крайні точки характеристики перетворення для заданого діапазону роботи.
У нашому випадку пряма, що з'єднує дві крайні точки робочого діапазону датчика 0 °C і 1300єС, є ідеальною лінійною характеристикою перетворення.
З графіків (див. рис. 1.1, рис 1.2) видно, що максимальне відхилення характеристики датчика від ідеальної прямої з’являється в значенні шкали 875 °C і становить 1,061.
Таке ж значення підтверджують математичні обчислення в програмі Microsoft Excel (з значень ідеальної лінійної характеристики віднімаються значення НСХ датчика ТХА (К)).
Відносна похибка — це різниця між номінальним і дійсним відносинами аналогової величини, що відповідає заданому цифровому вхідному сигналу, до повної шкалою, незалежно від калібрування останньої.
Максимальна відносна похибка нелінійності (у %) в діапазоні температур від 0 °C до 1300єС, визначається за формулою:
чи ,
де — значення ідеальної лінійної характеристики перетворення для температури 875єС; - значення термо-е.р.с. НСХ термопари ТХА (К) для температури 875єС; - діапазон значень термо-е.р.с. НСХ термопари ТХА (К) для крайніх точок характеристики перетворення. Отже, максимальна відносна похибка нелінійності (у %) складе:
Наш вимірювальний перетворювач повинен забезпечувати клас точності 0,25. Також вимірювальний перетворювач повинен забезпечувати запас по похибки, який повинен бути не менше 20%. Тобто 20% від 0,25 становлять 0,05 і тоді точність перетворення повинна бути краще 0,2 (0,25 — 0,05 = 0,2).
У нашому випадку максимальна похибка нелінійності становить 2%, що більше необхідної (0,2%), тому необхідно провести лінеаризацію для забезпечення заданого класу точності вимірювання температури датчика ТХА (К).
Роздільна здатність перетворювача є найменший рівень вхідного аналогового сигналу (для аналого-цифрового перетворення), для якого виробляється вихідний цифровий код, і найменший вхідний цифровий код (для цифро-аналогова перетворення), для якого утворюється рівень вихідного аналогового сигналу. На практиці корисна роздільна здатність перетворювача часто виявляється менше зазначеної, оскільки вона обмежується через впливу шуму, температури і факторів часу.
Для визначення значення корисної роздільної здатності вимірювального перетворювача з заданою точністю застосуємо формулу:
де — корисна роздільна здатність перетворювача; - необхідне значення класу точності перетворювача (0,2).
Таким чином, корисна роздільна здатність (розрядність) аналого-цифрового перетворення повинна бути краще 500 одиниць (квантів).
Згідно ГОСТ 8.009 «Метрологічні характеристики засобів вимірювання» максимальна похибка перетворювача не повинна перевищувати ± 5 квантів (одиниць молодшого розряду), тому роздільна здатність аналого-цифрового перетворення буде дорівнює:
де — значення роздільної здатності аналого-цифрового перетворення; - корисне значення роздільної здатності; - максимальна похибка перетворювача (± 5 квантів).
Якщо взяти 11-розрядний АЦП, то повне значення роздільної здатності дорівнюватиме 211=2048, що недостатньо. Тому роздільна здатність аналого-цифрового перетворювача повинна бути краще 2500едініц (квантів), тобто розрядність перетворювача повинна бути не нижче 12 (212=4096).
При необхідності лінеаризації, на неї треба додатково 2 розряду, тоді значення роздільної здатності аналого-цифрового перетворення буде: 12+2=14 розрядів.
Таким чином, роздільна здатність аналого-цифрового перетворення повинна бути не менше 14 розрядів.
3. Лінеаризація НСХ перетворювача
3.1 Технічне рішення щодо лінеаризації НСХ перетворювача Якщо лінеаризація необхідна, то в схему вимірювального перетворювача має бути введено нелінійне ланка, яке компенсує нелінійність датчика. Зазвичай, це ланка вводиться в коло негативного зворотного зв’язку підсилювача (рис. 3.1).
Рис. 3.1. Схема вимірювального перетворювача Для створення нелінійних ланок із заданою функцією перетворення найбільш ефективне застосування кусочно-лінійної апроксимації цієї функції. У цьому методі вихідну функцію представляють ламаної кривої, зменшуючи тим самим число точок характеристики, значення яких необхідно тримати в пам’яті обчислювального пристрою, відповідно при цьому зменшуються вимоги до обчислювальному пристрою, що здешевлює вартість всієї системи і спрощує її. При цьому необхідно визначити величину кожного лінійної ділянки і число ділянок при заданій похибки апроксимації.
Розділимо нашу вихідну НСХ термоперетворювача на кілька ділянок, в кожному з яких НСХ представляється прямим відрізком, що з'єднує крайні точки характеристики НСХ.
У першому наближенні число необхідних ділянок лінеаризації можна визначити за формулою 3.1:
де — число ділянок лінеаризації;
— максимальна похибка лінеаризації (%)
— необхідна точність перетворення (0,2)
Тоді,
ділянок Таким чином, для відповідності перетворювача класу точності 0,25, вихідну НСХ термоперетворювача необхідно розділити на 10 ділянок.
При такому числі ділянок кусочно-лінійна апроксимація неефективна, а використання ПЗУ для прямого перетворення вихідного коду АЦП в значення температури дозволяє просто реалізувати відповідність перетворювача класу точності 0,25 для діапазону температур від 0 до 1300 °C.
Значення необхідної ємності ПЗУ знайдемо за формулою:
де — число вхідних значень для ПЗУ;
— розрядність вхідних даних з АЦП;
— довжина коду АЦП (в байтах).
У нашому випадку N = 14 розрядів, довжина вихідного коду d= 2байта (14біт/8біт).
3.2 Автоматичне управлення параметрами первинних перетворювачів у складі інформаційно-вимірювальних систем На сьогоднішній день важко собі уявити виробництво або виробничий процес без застосування інформаційно-вимірювальних систем. Крім того, рідко яка система має класичний вигляд: первинний перетворювач — вторинний перетворювач — аналого-цифровий перетворювач — як мінімум, мікропроцесор або мікроконтролер — запам’ятовуючий пристрій. Практично вся знімається інформація запам’ятовується і обробляється. З кожним днем ці процеси всіляко ускладняються, від простих до нескінченно складних. Таким чином сучасні інформаційні технології вже практично витіснили всім нам раніше відомі статистичні та аналітичні відділи, що займають і велика кількість і людських ресурсів, і технічних, а саме напевно головне — часових показників. Саме необхідність прийняття миттєвих рішень і змушує застосовувати швидкодіючі інформаційно-технічні засоби.
Будь-яка інформаційна система має цілу низку метрологічних параметрів і характеристик. Все більше впроваджуються інтелектуальні інформаційно-вимірювальні системи, здатні практично миттєво, прийнявши з певною ймовірністю правильне рішення, відреагувати на одне або навіть ряд збурюючих впливів.
У цьому випадку може виникнути необхідність управління або стеження за одним і тим же об'єктом, наприклад в черговому або в робочому режимі. Або, наприклад, при отриманні попереднього попередження необхідно перевести систему в режим збору даних з більшою точністю або роздільною здатністю. Для вирішення такого завдання, можливе підключення додаткових каналів, інформаційно-вимірювальних систем або датчиків.
Для вирішення такого завдання доцільніше використання роботи однієї і тієї ж системи в багаторівневому режимі і робити керування за рівнем перевищення абсолютної або відносної помилки. Для цього є можливість використання математичного моделювання з різним ступенем наближення, або іншими словами кажучи, використання різного порога помилки — відхилення вимірюваної величини від заданого, наприклад, паспортного, рівня.
Для розв’язування розрахунково-експериментальної завдання взяті довільні датчики вібрації, експериментальним шляхом знята їх характеристика.
На сьогоднішній день, звичайно ж, є різні прикладні програми, здатні перетворити масив знятих даних в рівняння математичної моделі. Для отримання можливості управління необхідно мати як мінімум дві, а може і більше таких моделей.
Якщо вібрація змінюється в невеликих межах, або точність зміни не висока то можна апроксимувати функцію зміни вихідного параметра як пряму лінію. Тоді будемо шукати наближуючу функцію у вигляді:
Абсолютна різниця для визначається наступним чином:
формулу (3.5) перепишемо у вигляді:
Розглянута сума є функцією з двома параметрами Завдання зводиться до відшукання мінімуму цієї функції. Використовуємо необхідна умова екстремуму:
Тобто Вирішивши систему двох рівнянь з двома невідомими щодо параметрів і, отримаємо конкретний вид шуканої функції Опускаючи математичні викладки, запишемо вираження для шуканих параметрів:
Розрахувавши значення, отримаємо величину середньоквадратичної помилки розглянутого наближення.
Щоб підібрати формулу, яка має залежність між двома величинами, якщо це залежність знайдена досвідченим шляхом, порівняти параметри одного і того ж рівня з даними, отриманими за допомогою відомих формул, порівняти відносну помилку вимірювання. Формули містять невелике число параметрів, таких як коефіцієнти, показники ступенів і т.д., зміною яких можна в тій чи іншій мірі варіювати помилкою. Щоб формула не виявилася дуже складною, число параметрів не повинно бути велике. Зазвичай беруть два-три параметра. При порівнянні звертають увагу на наявність максимумів і мінімумів, поведінка функції при великих і малих значеннях аргументу, опуклість кривої вгору або вниз на окремих ділянках і т.д. Вибравши серед відомих формул підходящу, слід підібрати такі значення параметрів, щоб різниця між досвідченими значеннями величини і значеннями, знайденими за формулою, не перевищувала задану помилку експерименту. Якщо ця різниця виходить занадто великий, повторюють спробу підбору коефіцієнтів формули.
Розглянемо найбільш вживані формули і відповідні їм графіки для взятого експерименту з температурою.
Так, наприклад, ступенева залежність (геометрична регресія) має вигляд:
Покажемо, як знаходження наближає функції у вигляді геометричної регресії може бути зведене до знаходження параметрів лінійної функції. Припускаючи, що в початковій таблиці 1 значення аргументу і функції позитивні, прологарифмуємо рівність (3.6) за умови
Введемо нову змінну тоді буде функцією від .
Позначимо тоді рівняння прийме вигляд:
тобто задача знову звелася до відшукання наближає функції у вигляді лінійної, що значно спрощує дослідження.
Практично для знаходження наближає функції у вигляді статечної необхідно виконати наступні операції:
1) прологарифмувуючи значення і в вихідних даних;
2) за новими даними знайти параметри і наближає функції виду;
3) використовуючи застосовані позначення, знайти значення параметрів й підставити їх.
Для визначення параметрів і остаточно отримуємо:
Розглянемо отримання показової залежності, яка має вигляд:
Якщо знайдена на досвіді залежність від є показовою, то графік залежності від являє собою пряму лінію, тангенс кута нахилу якої дорівнює параметру. Якщо значення при невідомо, то величину параметра можна знайти за формулою для ряду значень, а потім взяти середнє.
Знайдемо коефіцієнти і для вихідної таблиці 1, якщо відомо, що приближаючи функцію доцільно шукати у вигляді показової функції.
Прологаріфмуемо рівність:
прийнявши позначення перепишемо у вигляді:
Таким чином наближає показова функція нехитрими перетвореннями зведена до лінійної, отже, для визначення коефіцієнтів і показовою функції можна скористатися вже виведеної для лінійної функції формулою.
Отже, для знаходження наближає функції у вигляді потрібно прологаріфмувати вихідні дані функції і, розглядаючи їх спільно з вихідними значеннями аргументу, отримати для нових даних приближаючи функцію.
Для визначення параметрів і остаточно отримуємо:
Таку ж методику можна застосувати для отримання математичної моделі, використовуючи функції дрібно-лінійної залежності, дрібно-раціональної функції, логарифмічною функції, гіперболічної залежності.
Для вирішення завдання наближення функції методом найменших квадратів сформулюємо основні кроки алгоритму.
1. Введення вихідних даних.
2. Вибір виду рівняння регресії.
3. Перетворення даних до лінійного типу залежності.
4. Отримання параметрів рівняння регресії.
5. Зворотне перетворення даних і обчислення суми квадратів відхилень обчислених значень функції від заданих.
6. Висновок результатів.
7. Розрахунок величини середньої квадратичної помилки.
Показано розв’язування розрахунково-експериментальної завдання з можливістю управління порогом спрацювання автоматичної стежить інформаційно-вимірювальною системою на прикладі стеження за температурою в декількох режимах, наприклад черговому і робочому, без використання додаткових датчиків і гілок. За результатами проведеного експерименту та отриманих даних маємо:
Отримано лінійна модель:
y = 1 908 854*x — 5601,8
Отримано експонентна модель:
y = 1,21*10-3 * e3998,3*x
Отримані графіки на основі математичного моделювання показані на рисунку 3.2.
Рис. 3.2. Графіки, отримані на основі математичного моделювання: а — лінійна модель; б — експоненціальна модель Розрахунки величини абсолютної і відносної середньоквадратичної похибки показали наступні результати. Для лінійної моделі абсолютна похибка — 2,35Ом; відносна — 1,13%; для експоненційної моделі абсолютна похибка — 0,48Ом; відносна — 0,0095%. Таким чином отримуємо можливість автоматичного управління по заданому діапазону розкиду параметрів первинного перетворювача.
4. Вибір і обґрунтування принципу роботи вузла аналого-цифрового перетворення По суті аналого-цифрові перетворювачі або перетворять аналоговий вхідний сигнал (напруга або струм) в частоту або послідовність імпульсів, тривалість якої вимірюють для забезпечення відображаючого цифрового сигналу, або, щоб отримати цифровий вихідний сигнал, порівнюють вхідний сигнал з змінним опорним сигналом, використовуючи внутрішній ЦАП.
В основному знаходять застосування 2 основних типи АЦП: двотактний інтегруючий АЦП і АЦП послідовного наближення. Кожен з них перетворює вхідну напругу в цифровий код, пропорційний вхідній напрузі.
При виборі принципу роботи вузла аналого-цифрового перетворення будемо враховувати наступні фактори: Точність перетворення; Швидкість перетворення; Стабільність точностних характеристик перетворювача в часі; Вартість перетворювача; Гальванічне розділення вхідних і вихідних кіл.
Такими факторами є:
1) із завдання відомо, що час реакції датчика на зміну температури складає більше 10 секунд — можемо застосувати низькошвидкосної АЦП;
2) вимоги до точності перетворення — 14 розрядний АЦП;
3) вартість перетворювача — якомога дешевше;
4) стабільність точностних характеристик перетворювача в часі - з плином часу перетворювач повинен забезпечувати високу якість перетворення без необхідності частої калібрування споживачем;
5) практично всі АЦП дозволяють реалізувати гальванічне розділення між вхідними і вихідними колами, відмінності будуть лише в технічній реалізації та вартості обраного рішення.
Цим вимогам відповідають інтегруючі АЦП, які мають додаткові переваги в порівнянні з АЦП послідовного наближення: мінімальне число необхідних точних компонентів, високу завадостійкість, відсутність диференціальної нелінійності, низьку вартість.
Недоліком таких АЦП є великий час перетворення, обумовлене прив’язкою періоду інтегрування до тривалості періоду живильної мережі. У нашому випадку вимоги по швидкодії АЦП дозволяють застосувати даний вид АЦП.
Принцип роботи двотактного інтегруючого АЦП. У першому такті циклу перетворення виробляється інтегрування — накопичення інтеграла від деякого вхідного сигналу, а потім у другому також виконується операція «розінтегрування» — зчитування накопиченого інтеграла шляхом подачі на вхід інтегратора іншого вхідного сигналу (опорного). Діаграма зміни напруги Uі на виході неінвертивного інтегратора при реалізації принципу двотактного інтегрування показана на рисунку 4.2.
Рис. 4.1 — Спрощена схема двотактного інтегруючого АЦП У першому такті тривалістю Т1 напруга Uи змінюється від деякого початкового рівня (в окремому випадку від нуля) до значення Uм. У другому такті тривалістю Т2 відбувається зворотне зміна Uи — від Uм до вихідного рівня. Накопичення інтеграла (протягом Т1) відбувається при подачі на вхід інтегратора напруги Uвх.и = U1, а зчитування (Т2) — при подачі напруги Uвх.и = U2.
Рис. 4.2. Діаграма зміни інтеграла при реалізації принципу двотактного інтегрування Сумарне збільшення інтеграла за цикл інтегрування дорівнює нулю, тому можна записати де ф — постійна часу інтегратора.
Звідси видно, що напруги U1 і U2 повинні мати різну полярність, а співвідношення тривалостей тактів визначається рівністю
4.1 Визначення часу перетворення вимірювального перетворювача Найбільшу затримку у перетворення вносить сама термопара, що має час реакції більше 10 секунд (за умовою). Для розрахунку візьмемо час реакції 10 сек.
Вхідний сигнал АЦП, що приходить з термопари, змінюється з частотою
де Т — час реакції датчика, рівне 10сек.
За теоремою Котельникова частота квантування повинна бути не менше. На практиці зазвичай береться .
Для нашого випадку:
.
Тоді максимальний час перетворення дорівнюватиме:
Це зразкове максимальну сумарну час.
Тепер обчислимо зразкову фактичний час перетворення:
У двотактному інтегруючому АЦП співвідношення тривалостей тактів визначається рівністю:
чи
У нашому випадку Uвх приймемо рівним 5,241 В (підсилювач повинен підсилювати вхідний сигнал з датчика в 100 разів), Uоп — 2,5 У як найбільш часто використовується опорна напруга в сучасних схемах і найпростіше у виконанні.
Тоді час розряду, і загальний час перетворення АЦП:
.
Найважливішим практично корисною властивістю АЦП двотактного інтегрування є його висока завадостійкість до мережевих перешкод. Для цього тривалість першого такту t1 вибирається рівної (або кратної) періоду напруги мережі 50 Гц, тобто
t1 = 20 мс = 20 • 10-3 с = 0,02 с.
Таким чином, максимальний час перетворення вимірювального перетворювача дорівнюватиме:
Цифровий фільтр, що стоїть після аналого-цифрового перетворювача, повинен виключити зі спектру сигналу високі частоти, і пропустити тільки корисний низькочастотний сигнал. Оцінимо час затримки сигналу в цифровому фільтрі. Час перетворення АЦП становить 0,062сек, звідси знайдемо частоту дискретизації АЦП як 1/0, 062сек? 16Гц. Фільтр повинен зрізати цю частоту і всі частоти вище цієї. Швидкість зміни корисного сигналу дуже низька (час реакції датчика 10с). Фільтр пропустить всі сигнали з частотою нижче 16Гц, тобто періодом більш 0,062сек. Таким чином, затримка обробки сигналу цифровим фільтром дорівнює 0,062сек.
Сумарний час перетворення одно
що набагато менше зразкового сумарного часу перетворення.
4.2 Структурна схема вимірювального перетворювача Вихідна напруга термопари пропорційно різниці температур між двома спаями (робочим і холодним). Термопари вимагають для свого застосування методів компенсації температури холодних спаїв.
У промисловості застосовують два основні методи:
1) Перший метод полягає в тому, що дроти від термопари до ЦПУ до вимірювального приладу виконують з тих же матеріалів, що і термопару. У цьому випадку вони називаються компенсаційними проводами.
Цей метод дозволяє перенести місця холодних спаїв від термопари у вимірювальний прилад, де і вимірюється їх температура (зазвичай термоопором, вбудованим або в спеціальну клемну коробку, куди підключаються компенсаційні проводи, або термоопором, розташованим прямо на платі вимірювального приладу, поряд з контактами, до яких підключаються компенсаційні проводи).
2) Сенс другого методу полягає в тому, що в даному випадку вимірювальний перетворювач, який вимірює температуру холодних спаїв, вносить відповідну компенсацію, підсилює і перетворює вихідний сигнал в стандартний струмовий, вбудовується прямо в головку термопари. При цьому вартість вимірювальної системи зменшується за рахунок відмови від компенсаційних проводів (струмовий сигнал у вимірювальний прилад можна передавати за звичайними мідним проводам), але додаються витрати на вбудовується вимірювальний перетворювач. Крім того, такому перетворювачу потрібне зовнішнє живлення.
Так як термопари мають низьку вихідну напругу (50мкВ/°С або близько цього), і застосовуються в областях, де існують великі синфазні перешкоди промислової частоти і радіочастотні наведення, то підсилювач (або вимірювальна схема) повинен добре придушувати синфазні перешкоди промислової частоти (50Гц) і мати стабільне диференціальне посилення.
Крім того, вхідний опір підсилювача має бути достатньо високим, щоб запобігти помилки від навантаження датчика, оскільки висновки термопар мають деякий опір.
Виходячи з цих положень, одним з варіантів структурної схеми вимірювального перетворювача може стати перетворювач, наведений на рисунку 4.3.
Рис. 4.3. Структурна схема вимірювального перетворювача: ПП — первинний перетворювач — датчик (термопара); У — підсилювач; ГР — гальванічний роздільник; АЦП — аналого-цифровий перетворювач; Ф — фільтр низьких частот; ІП — джерело стабілізованої напруги харчування; Т — температура; Uоп — опорна напруга живлення; Х — двійковий код на виході АЦП, пропорційний температурі; ХФ — двійковий код на виході цифрового фільтра, пропорційний температурі
Розглянемо призначення кожного вузла структурної схеми вимірювального перетворювача.
Для посилення корисного сигналу використовується підсилювач У. Коефіцієнт посилення по напрузі підбирається таким чином, щоб вихідна напруга підсилювача відповідало діапазону вхідних напруг АЦП, наприклад, від 0 до 5 В.
АЦП — аналогоцифровий перетворювач — один з основних елементів даного вимірювального перетворювача. Функцією АЦП є перетворення вхідної напруги у вихідний двійковий код Х. У даному випадку для забезпечення достатньої точності і швидкодії використовується 14 — розрядний АЦП двотактного інтегрування.
4.3 Гальванічне розділення вхідних і вихідних кіл Датчик, лінія зв’язку і найближчі до неї вхідні вузли вимірювального перетворювача найбільш схильні до впливу перешкод через низький рівень корисного сигналу, що протікає через ці кола. Один з найбільш поширених механізмів проникнення перешкод у вимірювальний перетворювач — утворення контурів заземлення. За досить довгої лінії зв’язку точки заземлення можуть бути рознесені один від одного на значні відстані, і між ними можуть виникати значні напруги, порядку десятків вольт.
У промислових умовах датчики мають невисоку ізоляцію від об'єкта, а іноді безпосередньо з'єднані з заземленими частинами обладнання. У результаті, якщо вхідна частина вимірювального перетворювача гальванічно пов’язана з заземленими частинами системи або має невисокий опір ізоляції від них, то через вхідні кола вимірювального перетворювача і датчик будуть протікати струми, що створюють напругу поздовжньої перешкоди, що перевищує рівень корисного сигналу.
Гальванічне розділення вхідних і вихідних кіл, виконує функцію розмикання контурів заземлення. У цьому випадку поздовжня перешкода може проникнути в систему тільки активні і реактивні складові опору ізоляції, і по амплітуді буде на кілька порядків менше, ніж у системах без гальванічного поділу.
Відповідно до призначення гальванічних роздільників (ГР) їх якість визначається характеристиками ізоляції між вхідними і вихідними колами — електричним опором і електричною міцністю. У той же час, оскільки ГР входять у вимірювальний тракт, не менш важливими є їх метрологічні характеристики.
У загальному випадку в ГР містяться два гальванічне не пов’язаних елемента, інформація між якими передається через магнітний або світловий потік. Відповідно в якості елементів гальванічного поділу можуть використовуватися наприклад, трансформатори або оптико-електронні елементи.
У даній схемі Гальванічне розділення реалізовано за допомогою оптопари. Для гальванічного поділу застосовується оптоелектронний перетворювач, що складається з світлодіода і фототранзистор. Вхідний струм протікає через світлодіод і викликає пропорційне світловий потік. Фототранзистор під дією світлового потоку виробляє фототок, пропорційний величині світлового потоку, а значить і величиною струму, що протікає в колі світлодіода.
У загальному випадку інформативний параметр вихідного сигналу датчика займає вузьку смугу частот шириною в одиниці герц. Водночас повний сигнал на вході вимірювального перетворювача представлений у більшості випадків широким спектром частот до декількох десятків кілогерц. Велику частину цього спектру займають власні шуми і перешкоди. У промислових умовах найбільшу амплітуду має перешкода мережевої частоти. Сигнал на виході АЦП може містити помилки, викликані перешкодами в лініях зв’язку, наприклад з частотою мережі 50 Гц і її гармоніками. Напруга перешкод може призвести до зростання випадкової складової похибки перетворювача. Крім того, вимірювальний перетворювач може сам служити джерелом перешкод. Так як у вимірювальному каналі вимірювального перетворювача використовується перетворення форми напруги у вузлі лінеаризації, то у вихідному сигналі перетворювача можуть бути присутніми різні нелінійні складові, представлені в спектрі вихідного напруги високими частотами.
Для придушення мережевої частоти і її гармоніки, а також внутрішніх шумів вимірювального перетворювача застосовується цифровий фільтр низьких частот.
Перевага застосування цифрового фільтра в тому, що він не робить впливу на метрологічні характеристики вимірювального перетворювача і не вносить спотворень в вимірювальні кола.
Цифровий фільтр може бути реалізований на базі того ж пристрою, який використовує сигнал вимірювального перетворювача, наприклад, в мікропроцесорі або ЕОМ.
Висновки Під час виконання данної дипломної роботи досліджено принцип роботи та склад системи вимірювання температури. У роботі приведені достоїнства та недоліки такої системи, методи та особливості вимірювання температури за якими працюе дана система.
У цій роботі представлений процес створення вимірювального перетворювача для датчика термопари. Побудований графік функції E = F (T). Побудована ідеальна лінійна характеристика перетворення по температурі. Визначено максимальна в заданому діапазоні температури похибка нелінійності характеристики і зроблено висновок про необхідність лінеаризації. Визначено роздільна здатність АЦ — перетворення з урахуванням лінеаризації.
Визначено число ділянок лінеаризації, що забезпечують задану точність перетворення, та запропоновано варіант лінеаризації НСХ перетворювача по температурі. Вибраний і обгрунтований принцип роботи вузла АЦперетворення. Визначено час перетворення вимірювального перетворювача. Розроблено структурну схему вимірювального перетворювача, із зазначенням основних функціональних вузлів.
В роботі було отримано рівняння математичної моделі первинного перетворювача температури, що дозволяє її використання для подальшого використання в інформаційних системах реального часу і за її допомогою являється можливість безперервного контролю за параметрами датчика. Розрахунки величини абсолютної і відносної середньоквадратичної помилки показали наступні результати. Для лінійної моделі абсолютна помилка — 2,44 Ом; відносна — 1,16%; для експоненціальної моделі абсолютна помилка — 0,51 Ом; відносна — 0,0097%.
Список використаної літератури
1. Кончаловський В. Ю., Купершмідт Я.А., Сиропятова Р. Я., Харченко Р. Р. Електричні вимірювальні перетворювачі. М. — Л., вид-во «Енергія», 1967
2. Ноткін Ю.А., Лопатка К. Н., Визгин Ю.І. Багатоканальні вимірювальні перетворювачі. — СПб: Вища школаю, СанктПетербурзьке від-ня, 1992
3. Гнатек Ю. Р. Довідник з цифроаналоговим і аналого-цифровим перетворювачам / Під ред. Ю.А. Рюжіна. — М.: Радіо і зв’язок, 1982
4. Гальперін М. В. Практична схемотехніка в промисловій автоматиці. — М: Вища школа, 1987
5. Батицкий И. А. та ін. Автоматизація виробничих процесів і АСОВІ ТП в гірській промисловості. — М.: Надра, 1991 р.
6. Батоврин В. К., Бессонов А. С., Мошкин В. В., LabVIEW: практикум по основам измерительных технологий / под ред. В. К. Батоврина. 2-е изд, переработ. и доп. — М.: ДМК Пресс, -2009. — 232 с.
7. Информационно-измерительная техника и технологии: учеб. для вузов / под ред. Г. Г. Раннева. — М.: Высшая школа, -2002.
8. Раннев Г. Г., Тарасенко А. П. Методы и средства измерений: учеб. для студ. высш. учеб. заведений. — М.: Издательский центр «Академия» , — 2008.
9. Тревис Дж. LabVIEW для всех. — М.: ДМК Пресс, — 2008.
10. Мейзда Ф. Электронные измерительные приборы и методы измерений. — М.: Мир, — 1990.
11. Фрайден Дж. Современные датчики: справочник. — М.: Техносфера, — 2005.
12. ГОСТ 8.009 «Метрологічні характеристики засобів вимірювання» .
13. ГОСТ 6616–94 «Перетворювачі термоелектричні. Загальні технічні умови»
14. ГОСТ Р8.585 — 2001 «Метрологія. Термопари. Номінальні статичні характеристики перетворення»