Застосування згладжувальних фільтрів у системах автоматичного підстроювання частоти радіоприймачів
Нестабільності частоти передавача і гетеродина приводять до порушення умови (1). Причому відхилення частоти від номінального значення може перевищити половину ширини смуги пропускання ППЧ, що приведе до різкого зменшення рівня сигналу на його виході. Наприклад, у радіомовних приймачах нестабільність частоти гетеродина без кварцової стабілізації складає величину порядку. У діапазоні метрових хвиль… Читати ще >
Застосування згладжувальних фільтрів у системах автоматичного підстроювання частоти радіоприймачів (реферат, курсова, диплом, контрольна)
ЗАСТОСУВАННЯ ЗГЛАДЖУВАЛЬНИХ ФІЛЬТРІВ У СИСТЕМАХ АВТОМАТИЧНОГО ПІДСТРОЮВАННЯ ЧАСТОТИ РАДІОПРИЙМАЧІВ
1 Основні характеристики систем АПЧ
Розглянемо питання застосування згладжувальних фільтрів, у системах автоматичного підстроювання частоти (АПЧ). Як відомо, зміна резонансної частоти преселектора і частоти гетеродина з метою дотримання умови
. (1)
виконується за допомогою органів настроювання радіоприймача. Слідом за цим виникає проблема підтримки цієї умови протягом визначеного проміжку часу і з точністю, що залежать від задачі, виконуваної РТС.
Нестабільності частоти передавача і гетеродина приводять до порушення умови (1). Причому відхилення частоти від номінального значення може перевищити половину ширини смуги пропускання ППЧ, що приведе до різкого зменшення рівня сигналу на його виході. Наприклад, у радіомовних приймачах нестабільність частоти гетеродина без кварцової стабілізації складає величину порядку. У діапазоні метрових хвиль при МГц отримуємо розстроювання від номінального значення проміжної частоти приблизно дорівнює кГц. Смуга пропускання радіомовних приймачів звичайно складає кГц. Таким чином, спектр сигналу виявляється за межами смуги пропускання, що приведе до значного ослаблення або навіть відсутності корисного сигналу на виході лінійної частини радіоприймача.
Як випливає з (1), при простому перетворенні розстроювання гетеродина цілком переходить на проміжну частоту. Це означає, що
(2)
відкіля при абсолютній стабільності передавача, тобто, отримуємо
. (3)
Тут і далі індексом «нуль» позначені номінальні значення частот сигналу, гетеродина і проміжної частоти.
З наведених міркувань видно, що нестабільність частоти гетеродина приводить до розстроювання приймальної системи і порушення нормального приймання сигналів. Поліпшити роботу радіоприймача можна шляхом розширення смуги пропускання, однак при цьому зростає коефіцієнт шуму і рівень завад, оскільки їхня величина пропорційна ширині смуги пропускання. Отже, підвищення якості приймання сигналів може бути досягнуто шляхом стабілізації значення частоти гетеродина за рахунок застосування АПЧ.
Системи АПЧ розрізняються за наступними основними характеристиками:
— за величиною кінцевого розстроювання на виході системи АПЧ: статичні, у яких забезпечується постійне значення кінцевого розстроювання. До статичних відносяться системи частотного автопідстроювання частоти (ЧАП). Астатичні - (системи фазового автопідстроювання — ФАП) забезпечують підстроювання частоти з точністю до фази, тобто опорне коливання і вихідний сигнал гетеродина виходять когерентними. В астатичних системах кінцеве розстроювання близьке (у межі, дорівнює) нулю .
Кількісним параметром, що характеризує ефективність системи АПЧ, є коефіцієнт автопідстроювання, який визначається як
; (4)
— за принципом регулювання: системи підстроювання резонансної частоти, системи підтримки абсолютного значення частоти ;
— за принципом роботи вимірювального елемента.
Побудуємо структурну схему системи АПЧ (рис. 1). Вимірюванню підлягає сигнал з виходу ППЧ. Вираз (1) показує, що стабілізацію частоти можна реалізувати двома способами. У першому випадку домагаються безпосереднього виконання рівності (1), тобто підстроювання частоти здійснюється за критерієм відхилення значення від номінального. В другому — критерієм АПЧ є рівність частоти гетеродина її номінальному значенню. Таким чином, у структурі АПЧ (рис. 1) є пристрій, що виконує функцію вимірювання відповідних значень частоти і виробляє сигнал помилки. Як вимірник використовується частотний (ЧД) або фазовий детектор (ФД). В останньому випадку в структурі АПЧ обов’язкова наявність генератора опорної частоти, і підстроювання здійснюється з точністю до фази опорного коливання. Відзначимо, що в залежності від призначення радіоприймача опорний генератор може бути або високостабільним зразковим джерелом (наприклад, у приймачах, що працюють на фіксованій частоті), або керованим за заданим законом від зовнішнього пристрою генератором (у так званих слідкувальних фільтрах).
У структурі АПЧ є ФНЧ, що усуває вплив високочастотних складових на роботу керованого генератора. Як ФНЧ зазвичай використовуютьсяфільтри різних порядків (як правило, I або II). Інерційність фільтра, тобто його здатність забезпечувати відносно повільні зміни вихідного сигналу при швидких або стрибкоподібних змінах сигналу на вході, визначає основні характеристики системи АПЧ Вихідний сигнал ФНЧ подається на керуючий елемент, який являє собою вакуумний або напівпровідниковий прилад (варикап, реактивна лампа, реактивний транзистор) або електромеханічну систему перестроювання частоти (наприклад, плунжер у хвильоводному або коаксіальному резонаторі), параметри якої змінюються під дією напруги, що приводить до зміни резонансної частоти вибірної системи. Для покращення характеристик системи АПЧ рівень сигналу ФНЧ може бути підвищений у ПСС. Керуючий елемент є складовою частиною резонансної системи гетеродина, з виходу якого сигнал подається на змішувач.
Рисунок 1 — Структурна схема системи АПЧ (СМ — змішувач, ОГ — опорний генератор, ВИМ — вимірник, ЧД і ФД — відповідно частотний і фазовий детектор, ПСС — підсилювач сталого струму, КЕ — керуючий елемент, Г — гетеродин)
Схема АПЧ працює у такий спосіб. Вихідна напруга СМ підсилюється ППЧ і подається на вимірювальний елемент. Далі робота схеми визначається видом вимірювального елемента. Так, у статичній системі використовується ЧД, який виробляє напругу, величина і знак якої залежить від величини розстроювання проміжної частоти від номінального значення. Керуюча напруга через фільтр подається на управник, що у залежності від величини і знака здійснює перестроювання гетеродина таким чином, щоб забезпечити виконання рівності. Відзначимо, що у випадку рівності частот напруга на виході вимірника дорівнює нулю і система АПЧ не працює.
Основна відмінність астатичної системи ФАП полягає в тому, що в ній як вимірювальний елемент використовується ФД, який виробляє вихідну напругу у залежності від різниці фаз коливання з виходу ППЧ і опорного генератора. Після проходження через фільтр ця напруга подається на управник і відбувається підстроювання частоти гетеродина з метою зменшення фазової помилки.
2 Побудова математичної моделі системи частотного автопідстроювання
Аналіз системи ЧАП проведемо в припущенні, що єдиною інерційною ланкою системи є ФНЧ. АПЧ реалізується системою зі зворотним зв’язком, передатна функція якої описується в загальному випадку виразом
(5)
де — передатна функція кола прямої передачі при розімкнутому зворотному зв’язку,
— передатна функція кола зворотного зв’язку.
Визначимо передатні характеристики окремих елементів системи АПЧ, що наведена на рис. 1. При верхнім настроюванні гетеродина (інверсному перетворенні частоти) і перетворенні по першій гармоніці гетеродина передатна характеристика кола прямої передачі при розімкнутому колі зворотного зв’язку дорівнює
. (6)
Передатна функція ЧД визначається як
(7)
тобто являє собою крутість ЧД.
Передатна характеристика керуючого пристрою разом з гетеродином записується у виді
(8)
тобто чисельно дорівнює крутості характеристики керуючого пристрою.
У результаті находимо коефіцієнт зворотного зв’язку
(9)
що після підстановки в (5) дає передатну функцію системи ЧАП у наступному вигляді
(10)
де позначено
. (11)
З (10) випливає, що система ЧАП описується рівнянням першого порядку. Як відомо, стійкість системи зі зворотним зв’язком визначається полюсами передатної функції. Згідно до критерію Рауса-Гурвіца, для даної системи необхідною і достатньою умовою стійкості буде позитивність коефіцієнтів характеристичного рівняння системи, тобто, коефіцієнтів знаменника. Оскільки завжди виконується, умова стійкості визначається як, відкіля випливає, що незалежно від абсолютних значень повинне виконуватися
. (12)
На практиці для підвищення стійкості системи ЧАП використовується більш твердий критерій
. (13)
Умова (13) означає, що система ЧАП буде стійкою, якщо крутість характеристики вимірника (ЧД) і керуючого пристрою будуть мати різні знаки, тобто їхні графічні залежності будуть зображуватися лініями з протилежними нахилами, як і показано на схемі рис. 1.
Оцінимо динамічні властивості системи ЧАП, для чого подамо на вхід збудження у виді стрибка частоти висотою (рис.2). В аналітичній формі таке збудження записується у виді
. (14)
В операторній формі збудження (14) виражається формулою
. (15)
Тоді зображення за Лапласом реакції системи ЧАП виходить як добуток виразів (10) і (15)
(16)
де — полюс зображення вихідної реакції (16), який дорівнює кореню рівняння в дужках. (Другий полюс — це корінь знаменника виразу (16), який дорівнює).
Оригінал функції (16) має вигляд
(17)
або, після підстановки (13) у (17)
. (18)
Очевидно, що розстроювання гетеродина є кінцевим розстроюванням кола ЧАП. У момент, коли система ЧАП починає працювати, кінцеве розстроювання дорівнює початковому, тобто. У сталому режимі (при) отримуємо
(19)
де — коефіцієнт автопідстроювання.
Увівши коефіцієнт автопідстроювання у вираз (18), находимо
. (20)
З (20) випливає, що процес установлення системи ЧАП є аперіодичним, а його тривалість і величина кінцевого розстроювання визначаються величиною коефіцієнта автопідстроювання. На практиці величина, тому можна приблизно прийняти
. (21)
Чим більшим є значення, тим швидше встановлюється стаціонарний процес у системі і вище ефективність системи АПЧ (тобто тим менше величина кінцевого розстроювання). Однак, це розстроювання не може дорівнювати нулю, оскільки система ЧАП є статичною. Побудуємо часові залежності перехідного процесу в системі ЧАП (20) при різних параметрах елементів системи (рис. 2).
Застосування фільтрів більш високого порядку підвищує порядок передатної функції системи ЧАП, що може привести до коливального процесу і самозбудження системи. Цей ефект називається перерегулюванням і спостерігається також при значному збільшенні коефіцієнта автопідстроювання (крива 3 на рис. 2).
Рисунок 2 — Перехідні процеси в системі ЧАП з різними коефіцієнтами автопідстроювання при дії стрибка частоти Відзначимо також, що при =1 вираз (17) є перехідною характеристикою системи АПЧ. Скориставшись формулою для інтеграла Дюамеля, можна в принципі визначити часову залежність відгуку системи на збудження довільної форми. Зворотне перетворення Лапласа формули (10) дає імпульсну характеристику системи, що дозволяє використовувати інтеграл накладення для того, щоб знайти відгук при довільному законі зміни частоти на вході.
3 Аналіз системи АПЧ при великих розстроюваннях. Регулювальна характеристика системи АПЧ
Процеси в системі ЧАП при великих розстроюваннях, що виходять за межі лінійної ділянки частотної характеристики ЧД і керуючого пристрою, описуються нелінійними рівняннями і є складними для теоретичного аналізу. За допомогою графічного методу аналізу, як показано на рис. 3, можна одержати характеристики ефективності роботи системи, придатні для інженерних розрахунків. Тут приведено частотну характеристику ЧД і сімейство характеристик керуючого пристрою при різних значеннях початкового розстроювання, причому відповідно до вимог умови (13), нахили характеристик обрані протилежними, що забезпечує узгодження роботи вимірювального елемента й керуючого пристрою системи АПЧ.
Перетинання характеристик ЧД і керуючого пристрою є рішенням рівняння системи АПЧ. Так, при нульовому початковому розстроюванні (характеристика керуючого пристрою 1) точка перетинання лежить на початку координат, отже,. При початковому розстроюванні (характеристика керуючого пристрою 2) точка перетинання N має координати і .
Визначимо за допомогою рис. 3 коефіцієнт автопідстроювання. З виразу (19) знаходимо
. (22)
Розглядаючи трикутники ONB і ANB, і вважаючи, що характеристики керуючого пристрою і ЧД лінійні в межах робочої ділянки, знаходимо
.
Підставляючи отримані вирази в (22), одержуємо формулу для коефіцієнта АПЧ:
. (23)
Враховуючи те, що умова стійкості системи АПЧ виконується, якщо крутість керуючого пристрою і ЧД мають різні знаки, отримуємо
. (24)
Розглянемо регулювальну характеристику системи АПЧ, що є залежністю кінцевого розстроювання від початкового. За допомогою регулювальної характеристики робиться оцінка ефективності системи в динамічному режимі. Ефективність АПЧ істотно залежить від величини максимально припустимого розстроювання, при якому АПЧ ще продовжує діяти. Для підтвердження цього, проаналізуємо рис. 3, збільшуючи початкове розстроювання, наприклад, убік збільшення. Видно, що характеристики керуючого пристрою 3 і 5 мають дві, характеристика 6 — одну, а характеристика 4 — три точки перетинання з частотною характеристикою ЧД. З них точки з, а, б, д, е, ж є стійкими, оскільки для них виконується умова (13). У точках в, г умова стійкості не виконується.
Граничне значення початкового розстроювання, при якому ще виконується умова стійкості (13), а система АПЧ ще працює, відповідає положенню характеристики керуючого пристрою 5. При подальшому збільшенні система АПЧ перестає працювати, оскільки керуюча напруга на управнику є близькою до нуля (положення точок д, е, ж), в результаті чого кінцеве розстроювання практично дорівнює початковому.
Максимальний діапазон початкових розстроювань на регулювальній характеристиці, у якому ще забезпечується ефективна робота системи АПЧ при заданих початкових розстроюваннях, називається смугою утримання. Для приведеного на рис. 3 графіка смузі утримання відповідає проекція точки б на вісь абсцис (точка С), а мінімальне кінцеве розстроювання складає, після чого стрибком це значення стає рівним >>.
Розглянемо процес у системі АПЧ, коли початкове розстроювання зменшується від значень, набагато більших, наближаючись до нуля. Характеристика керуючого пристрою займає положення 6, 5, 4, 3. При цьому точки перетинання з частотною характеристикою ЧД ж, е, д стійкі, однак АПЧ не працює. Тепер при початковому розстрюванні кінцеве розстроювання виявляється достатньо великим (точка д на графіку).
Рисунок 3 — Графічний метод аналізу системи ЧАП Початок роботи системи АПЧ відповідає положенню характеристики керуючого пристрою 3 і точці перетинання з віссю абсцис D. При цьому точка перетинання характеристики детектора та керуючого пристрою стрибком переходить з хиткого положення г у стійке положення з, а кінцеве розстроювання від значення приймає значення << .
Максимальний діапазон початкових розстроювань на регулювальній характеристиці, починаючи з яких система АПЧ забезпечує ефективне підстроювання частоти, називається смугою захоплення .
Видно, що із зростанням крутості керуючого пристрою кут зменшується і точки г і D «сковзають» вправо, а це означає, що смуга захоплення збільшується. Одночасно, характеристика керуючого пристрою, що відповідає положенню 6, буде розташована під новим (меншим) кутом і точка ж на графіку також зміститься вправо, що свідчить про збільшення смуги утримання.
Котангенс кута нахилу регулювальної характеристики, як видно з рис. 3 та виразу (19), дорівнює коефіцієнту автопідстроювання
.
Так, на рисунку, що означає, що при дії АПЧ коефіцієнт автопідстроювання виявляється набагато більшим, ніж без АПЧ, оскільки. Таким чином, коефіцієнт АПЧ дозволяє показати, наскільки зменшиться відхилення частоти гетеродина від номінального значення при дії системи АПЧ, а отже, у скільки разів буде ослаблений ефект прямого переносу розстроювання гетеродина на проміжну частоту.
Уведення параметрів і дозволяє висунути наступні вимоги до частотної точності радіоприймача, у якому використовується система автопідстроювання частоти:
— за припустимим початковим розстроюванням
(25)
за припустимим розстроюванням в процесі регулювання
. (26)
Наближене значення смуги утримання можна одержати, аналізуючи рис. 3. Як видно, половина смуги утримання дорівнює сумі відрізків ОС і Се, тобто. Побудувавши в думках трикутники ОбС і бСе знаходимо
. (27)
Підставляючи (27) у вираз для смуги утримання, знаходимо
=
=. (28)
Оскільки крутість частотної характеристики ЧД, його смуга пропускання і максимальне значення керуючої напруги на виході ЧД (див. рис. 2) зв’язані співвідношенням
отримуємо після підстановки в (28)
(29)
тобто смуга утримання системи ЧАП пропорційна смузі пропускання вимірювального елемента (у системі ЧАП таким елементом є ЧД).
Відзначимо знову, що підвищення ефективності системи ЧАП зв’язано зі збільшенням крутості ЧД і керуючого пристрою і розширенням смуг утримання і захоплення. Однак ці вимоги суперечливі і розрахунок системи ЧАП вимагає оптимізації. Оскільки область лінійності характеристики ЧД обмежена, при підвищенні крутості звужується смуга пропускання, а отже, зменшується і смуга утримання, відповідно до (29). Крім того, наявність кінцевого розстроювання в системі ЧАП не дозволяє застосовувати її в радіоприймачах, де вимоги до настроювання складають величину одиниць герц.
З формули (24) та рис. 3 випливає, що підвищення коефіцієнту автопідстроювання можливо як за рахунок збільшення крутості АЧХ ЧД, так і за рахунок підвищення крутості характеристики управника. Однак детальний аналіз показує, що ефективність цих способів не однакова. Так, крутість АЧХ ЧД на основі дискримінаторів, які широко застосовуються в побутовій апаратурі, визначається добротністю контурів в схемі. Однак підвищення добротності призводить до звуження смуги пропускання ЧД (збільшення кута на рис. 3) і, як наслідок, до зменшення смуги робочих частот системи АПЧ і смуги утримання (формула (29)).
З іншого боку — підвищення крутості характеристики управника (зменшення кута на рис. 3) призводить до розширення і смуги утримання, і смуги захоплення. Тобто більш прийнятним є підвищення крутості характеристики управника, для чого в коло зворотного зв’язку на виході ФНЧ рис. 2 можливо введення підсилювача сталого струму (ПСС).
4 Аналіз впливу характеристик фільтрів у системі АПЧ на часові залежності процесу встановлення частоти
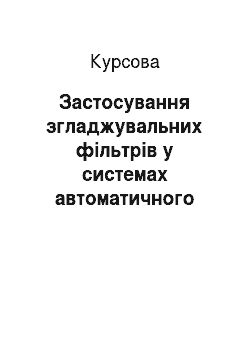
Ураховуючи, що передатна характеристика системи АПЧ, а, отже і часові залежності процесу встановлення частоти визначаються властивостями ФНЧ, дослідимо характер процесів у системі АПЧ при використанні різних фільтрів. Нехай як фільтр використовується схема II порядку (рис. 4) з коефіцієнтом передачі. Тоді передатна функція системи АПЧ приймає вид
(30)
а зображення відгуку на стрибкоподібну зміну частоти виду (14) буде дорівнювати
(31)
або при
(32)
Результати розрахунку оригіналу останнього виразу при 1 приведені на рис. 4. На рисунку другий і третій аргументи функції являють собою відповідно постійну часу в мікросекундах і коефіцієнт автопідстроювання .
Як видно, перехідний процес установлення частоти має коливальний характер, причому загасання процесу залежить від коефіцієнта автопідстроювання (зі зростанням амплітуда коливань зростає при одночасному зменшенні часу встановлення кінцевого розстроювання). Частота коливань залежить від постійної часу фільтра. Крім того, абсолютне значення кінцевого розстроювання в системі також знижується зі зростанням .
Рисунок 4 — Перехідні характеристики системи АПЧ із фільтром II порядку в колі зворотного зв’язку Якщо в якості ФНЧ використовується згладжувальний фільтр, який реалізує операцію поточного усереднення, формули для передатної функції системи АПЧ і зображення відгуку на східчастий вплив одиничної висоти приймають вид відповідно
(33)
. (34)
Оригінал останнього виразу можна знайти за допомогою теореми лишків. Для цього перепишемо (34) у вигляді
. (35)
Полюси функції (35) дорівнюють відповідно і, причому точність визначення зростає зі збільшенням значення. Графік, що пояснює останню умову, побудовано на MathCAD сторінці 7.
Наближений розрахунок процесу встановлення частоти при апроксимації фільтра поточного середнього ланцюжним дробом для різних значень сталої часу і коефіцієнта автопідстроювання приведений на MathCAD сторінці 8 (другий і третій аргументи функції на графіку є відповідно коефіцієнт автопідстроювання і стала часу в мікросекундах). Як видно процес є коливальним і установлення частоти прискорюється із зростанням коефіцієнту автопідстроювання. При цьому також зменшується кінцеве розстроювання у відповідності із (19).
Для точного розрахунку оригіналу функції (34) можна також використати теорему розкладання, відповідно до якої
(35)
де сума розповсюджується на усі особливі точки функції, а саме та .
В результаті отримуємо за умови
(36)
тобто початкове розстроювання експоненційно зменшується у часі із сталою часу, прагнучи до .
5 Фазове автопідстроювання частоти
Системи фазового автопідстроювання (ФАП) широко застосовуються в сучасних радіоприймачах. Основною перевагою ФАП є можливість одержання регулювальної характеристики, кут нахилу якої до осі частот дорівнює нулю. Таким чином, система ФАП забезпечує когерентність вхідного й опорного коливань.
Відмінність системи ФАП від розглянутої вище системи АПЧ полягає в тім, що тут як вимірювальний елемент замість ЧД застосовується ФД. Проаналізуємо систему ФАП (рис. 3), вважаючи що передатні функції всіх елементів системи, крім вимірника, аналогічні розглянутим раніше й описуються виразами (6) і (8).
Визначимо передатну функцію ФД. Вихідна напруга ФД є функцією різниці фаз вхідного та опорного коливань. З огляду на те, що, використовуючи вираз (7) і властивості перетворення Лапласа, знаходимо передатну функцію ФД у наступному вигляді
(36)
де — означає пряме перетворення Лапласа виразу, який стоїть в дужках.
Підставимо значення передатних функцій елементів системи ФАП у вираз (5) і одержимо
(37)
де застосовані позначення, аналогічні введеним раніше:, .
Таким чином, передатна функція системи ФАП виражається рівнянням другого порядку. Зображення кінцевого розстроювання при дії на вході стрибка частоти (14) представляється у вигляді
. (38)
Стійкість системи визначається полюсами функції (37), тобто коренями характеристичного рівняння
(39)
розрахунок яких показаний на MathCAD сторінці 9. Як відомо, корені рівняння з дійсними коефіцієнтами можуть бути або дійсними, або комплексно сполученими (за умови теореми Безу).
Відповідно до критерію Рауса-Гурвица, стійкість має місце за умови позитивності всіх коефіцієнтів характеристичного рівняння. З огляду на те, що завжди виконується, умовою стійкості для (38) буде виконання нерівності
. (40)
Приводячи (38) до вигляду
(41)
можна знайти оригінал функції (38) по таблицях перетворення Лапласа або за допомогою теореми розкладання і теореми лишків. У результаті знаходимо
. (42)
Отриманий вираз безпосереднє описує перехідний процес у системі ФАП для випадку дійсних коренів характеристичного рівняння. При цьому виконується умова, за якої процес установлення стаціонарного режиму має аперіодичний характер.
У випадку комплексно сполучених коренів, перехідний процес буде мати коливальний характер. Тоді, представивши корені (39) у вигляді
(43)
за умови отримуємо вираз для коливального перехідного процесу в системі за допомогою таблиць
(44)
де позначено
. (45)
Аналіз отриманих рішень показує таке. У початковий момент часу при кінцеве розстроювання дорівнює початковому, тобто. З формул (42) і (44) видно, що в аперіодичному режимі час установлення буде тим меншим, чим більшою є величина. При в системі настає сталий режим, оскільки. Отже, система ФАП є астатичною. При цьому кінцеве розстроювання також прагне до нуля, що принципово відрізняє систему ФАП від ЧАП.
6 Система ФАП із пропорційно-інтегруючим фільтром
У коливальному режимі тривалість процесу встановлення системи ФАП залежить від сталої часу ФНЧ: чим менше, тим швидше встановлюється стаціонарний режим. Однак при цьому розширюється смуга пропускання ФНЧ, що приводить до суперечливих наслідків: з одного боку, погіршенню фільтрації високочастотних складових напруги за межами спектру корисного сигналу на проміжній частоті, а з іншого боку — до розширення діапазону роботи системи ФАП. Для усунення зазначеного протиріччя застосовують пропорційно-інтегруючі фільтри, що забезпечують стійку роботу ФАП у широкому частотному діапазоні.
Передатна функція системи АПЧ з пропорційно-інтегруючим фільтром виражається формулою
(46)
а зображення відгуку на одиничний стрибок частоти
. (47)
Оригінал функції (47) визначимо за допомогою зворотного перетворення Лапласа доданків правої частини (47) у пакеті MathCAD. (Вираз для функції виходить за межі MathCAD сторінки 10 і тому не показаний).
Як видно з отриманого графіка система АПЧ швидко сходиться до сталого режиму з нульовою кінцевою помилкою.
7 Якісний аналіз системи ФАП. Регулювальна характеристика системи ФАП
Особливістю роботи системи ФАП є незалежність від співвідношення знаків крутості ФД і керуючого пристрою, що диктується умовою (13). Дійсно, з парності амплітудно-фазової характеристики (АФХ) ФД (рис. 5), випливає, що в залежності від знака крутості керуючий пристрій умова (13) буде виконуватися або в області, або в області. Різниця буде полягати у величині залишкової фазової помилки в сталому режимі системи ФАП. Крім того, підкреслимо важливу особливість: залишкова помилка в системі ФАП є різниця фаз коливань опорного генератора і гетеродина, у той час як частоти цих коливань рівними між собою. За невиконання цієї умови фазова помилка становитиме. Якщо різниця фаз буде підтримуватися незмінною, то коливання опорного генератора і гетеродина будуть когерентними.
АФХ вимірювального елемента в системі ФАП є періодичною функцією, а лінійна ділянка характеристики, для якої справедливі проведені вище міркування, обмежена діапазоном фаз від до .
Рисунок 5 — Амплітудно-фазова характеристика ФД системи ФАП Нехай у момент часу різниця фаз опорного коливання і гетеродина дорівнює, а частоти гетеродина й опорного генератора відрізняються на величину. При цьому напруга на виході ФД буде дорівнювати. Через один період частоти гетеродина різниця фаз стане дорівнювати
а напруга на виході ФД
.
(Помітимо, що в даному випадку величина, тому що і). Через наступний період напруга стане рівною. Далі процес буде повторюватися, поки напруга не наблизиться до точка стійкої рівноваги. Сказане ілюструється рис. 6.
На відміну від системи ЧАП, у якій сталий режим характеризується наявністю кінцевої розстройки, у даному випадку підстроювання частоти відбувається, навіть якщо частоти опорного коливання і гетеродина стануть рівними, а розрізнятися будуть тільки початкові фази цих коливань, тобто система ФАП «відрізняє» різницю коливань у межах одного періоду. Таким чином, коефіцієнт автопідстроювання у системі ФАП дорівнює. У результаті одержуємо, що регулювальна характеристика системи ФАП збігається з віссю абсцис (кут), а смуга захоплення дорівнює смузі утримання, що показано на рис. 7.
Рисунок 6 — Установлення напруги ФД у системі ФАП На практиці робота систем АПЧ характеризується ще однією особливістю при роботі в діапазоні метрових хвиль в умовах глибоких завмирань сигналу. У цих умовах рівень сигналу опускається нижче порога чутливості, і напруга на вході вимірювального пристрою відсутня. Отже, відсутня і керуюча напруга, що виробляється у вимірювальному пристрої під дією сигналу, і подальше поводження системи АПЧ визначається реакцією керуючого пристрою. З метою запобігання перехідних процесів, викликаних проваллям сигналу на вході вимірювального пристрою, у системі АПЧ необхідно передбачити фіксацію рівня керуючої напруги на керуючим пристрої з метою збереження накопиченої поточної помилки і збереження тим самим поточного настроювання радіоприймача.
Рисунок 7 — Регулювальна характеристика системи ФАП
8 Застосування системи АПЧ у слідкувальних фільтрах
У радіоприймачах, призначених для виділення доплеровської частоти, забезпечення широкої смуги і високої чутливості є суперечливими вимогами, задовольнити які одночасно вдається за допомогою слідкувальних фільтрів (СФ). Один з варіантів такої системи приведений на рис. 8. Використання в СФ системи ЧАП забезпечує широку смугу утримання, а наявність ФАП дає можливість точної підтримки проміжної частоти.
Рисунок 8 — Структурна схема радіоприймача із слідкувальним фільтром Система ЧАП забезпечує спостереження за частотою сигналу при великих розстроюваннях, завдяки широкій смузі утримання. Коли кінцеве розстроювання стане менше половини смуги пропускання вузькосмугового підсилювача (ВСП)
система ЧАП виключається і починає працювати ФАП. Для цього необхідно виконання умови
.
На рис. 9 момент вимикання системи ЧАП і включення системи ФАП позначений. Наявність ФАП дозволяє звести кінцеве розстроювання до 0, незалежно від значення початкового розстроювання і причин зміни частоти сигналу.
Рисунок 9 — Часова діаграма роботи АПЧ у слідкувальному фільтрі
Використання цифрових схем дозволяє реалізувати на їхній основі цифрові системи ФАП, що знаходять застосування в сучасних радіоприймачах.
9 Розрахунок характеристик системи АПЧ за допомогою програмного пакета MathCAD
При розрахунку в програмному пакеті MathCAD зручно користатися можливостями символьних обчислень (MathCAD сторінка 11). Алгоритм розрахунку представимо наступною послідовністю:
1. Уводимо вирази для АЧХ частотного детектора.
2. Розраховуємо похідну АЧХ:
— наведемо курсор на незалежну перемінну ;
— у меню Symbolics виберемо операцію Variable і команду Differentiate.
3. Копіюємо отриманий вираз і дорівнюємо його функції .
4. Будуємо графіки сімейства АЧХ і її похідних для різних значень параметра зв’язку А.
5. Для параметра зв’язку визначаємо смуги утримання і захоплення (MathCAD сторінка 12). Результати наведено в правій частині графіка. Тут — крутість керуючого пристрою.
автоматичне підстроювання частота радіоприймач Порівняння графіків АЧХ детектора і її похідної показує, що найбільший розмах лінійної ділянки виходить при значенні параметра зв’язку А=3. Максимальне значення крутості лінійної ділянки досягається при 1.
Смуги захоплення й утримання знаходяться як корені лінійних рівнянь дотичної у відповідних точках АЧХ детектора. Розрахунок показує, що збільшення смуги захоплення й утримання системи АПЧ забезпечується при підвищенні крутості характеристики керуючого пристрою.