Розробка конструкції вимірювального перетворювача частоти дихання
В основу принципу дії перетворювача покладена зміна розмірів зрудної клітки під час дихання (розширення при вдиху). ВП складається з двох котушок індуктивності (передаючої та приймальної). Передаюча котушка випромінює електромагнітні хвилі, в результаті чого в приймальній котушці наводиться електрорушійна сила (далі ЕРС) Принцип дії даного перетворювача базується на зміні наведеної в приймальній… Читати ще >
Розробка конструкції вимірювального перетворювача частоти дихання (реферат, курсова, диплом, контрольна)
ЗАВДАННЯ НА САМОСТІЙНУ РОБОТУ
Варіант № 20
Розробити конструкцію вимірювального перетворювача частоти дихання.
Частота дихання: 20−120 разів в хвилину;
Робочий діапазон температур: −45…+45оС
АНОТАЦІЯ
Самостійна робота. Розробка конструкції вимірювального перетворювача частоти дихання.
Тернопільський національний технічний університет імені Івана Пулюя, факультет контрольно-вимірювальних та радіокомп'ютерних систем, кафедра біотехнічних систем, група Тернопіль: ТНТУ 2010.
Сторінок — 32, джерел — 5, рисунків — 8.
Ключові слова:
Пневмограма, дихання, давач, вимірювальний перетворювач, котушка, магнітна індукція.
В даній самостійній роботі розроблена конструкція та розраховані параметри індукційного вимірювача лінійних переміщень. Розраховані основні параметри давача та сформульовані рекомендації щодо підключення давача та обробки даних.
СПИСОК СКОРОЧЕНЬ
БСЛ — закон Біо-Савара-Лапласа;
ВП — вимарювальний перетворювач;
ЕРС — електрорушійна сила.
ЗМІСТ
Вступ
1. Пневмографічні методи дослідження
1.1 Пневмограф з повітряною передачею
1.2 Імпедансний метод
1.3 Реєстрація зміни температури вдихуваного/видихуваного повітря
1.4 Індукційний вимірювач лінійних переміщень
1.5 Вимірювання деформації грудної клітки за допомогою тензорезистора
2 Типи дихання, частота, глибина, характер дихальних рухів
3. Побудова схеми первинного вимірювального перетворювача та розрахунок параметрів
3.1 Побудова функціональної схеми ВП
3.2 Розрахунок характеристик передаючої та приймальної котушок
3.3 Виведення рівняння перетворювача
3.4 Обчислення похибки вимірювання
3.5 Обчислення температурної похибки
4 Конструювання первинного вимірювального перетворювача
4.1 Визначення діаметру дроту обмоток
4.2 Визначення довжини дроту
4.3 Розробка та опис конструкції вимірювального перетворювача Висновки Список використаної літератури Додатки
ВСТУП. АКТУАЛЬНІСТЬ ВИБРАНОЇ ТЕМИ
В клінічних дослідженнях та обстеженнях досить часто потрібно виміряти такий параметр як частоту дихання. Для кращого відображення параметрів дихання на реєструючому пристрої записується крива дихання, що дає можливість побачити глибину, ритмічність, оцінити частоту дихання та, частково об'єм вдихуваного повітря. Дана процедура має назву пневмографія.
Пневмографія (від грецьк. pnevma — дихання і grapho — пишу) — запис (реєстрація) дихальних рухів людини і тварин. Пневмографія широко застосовується в експериментальних і клініко-фізіологічних дослідженнях для отримання відомостей про характер дихальних рухів, регуляцію зовнішнього дихання і його порушення при різних захворюваннях і патологічних станах. Ще одна галузь застосування пневмографічного дослідження — в детекторах брехні (поліграфах). Ще в 1914 році професор австрійського університету в Граце італієць Вітторіо Бенуссі, вивчаючи проблеми психофізики, опублікував дані своїх досліджень динаміки процесу дихання, які показують, що частота, глибина дихальних циклів і відношення тривалості вдиху до тривалості видиху міняється, коли обстежуваний бреше.
Методичні прийоми пневмографії різноманітні; використовувана апаратура має 3 основних елементи:
— давач, що безпосередньо сприймає дихальні рухи;
— пристрій, що передає показники давачів до реєструючого апарату;
— реєструюча система.
Зазвичай давач, а іноді і всю установку називають пневмографом. Сигнали давачів можуть передаватися до реєструючої установки на великі відстані за допомогою радіозв'язку — телепневмографія. Пневмографія не дає кількісної оцінки вентиляції легень, тому її зазвичай доповнюють спірометрією або спірографією, що забезпечують реєстрацію основних легеневих об'ємів, а також пневмотахографією — реєстрацією об'ємних швидкостей повітря, що поступає в легені при вдиху і що покидає їх при видиху. Для дослідження значення окремих м’язів в здійсненні дихальних рухів і аналізу особливостей зовнішнього дихання пневмографію поєднують з електроміографією дихальних м’язів.
1. ПНЕВМОГРАФІЧНІ МЕТОДИ ДОСЛІДЖЕННЯ
Двома найбільш поширеними показниками є частота і глибина дихальних рухів (основні види та параметри дихання буде розглянуто нижче). Для реєстрації пневмограми використовую механічні і електричні (імпедансні) пневмографи. Принцип роботи механічних пневмографів полягає в механічній (важелем, повітрям) передачі коливань грудної клітки в записуючий механізм, важіль якого пише криву на стрічці кімографа.
1.1 Пневмограф з повітряною передачею
Найбільш простий по конструкції пневмограф з повітряною передачею. Конструкція приладу складається з манжети, подібної тій, що надягається на руку при вимірюванні тиску. Манжета кріпиться за допомогою тасьомок до нижньої частини грудної клітки випробовуваного. Потім система заповнюється повітрям і герметизується. Коливання тиску повітря в пневмографі, обумовлені дихальними рухами, по гумовій трубці передаються в мареєвську капсулу, і важіль реєструє пневмограму Запис зміни тиску в манжеті проводиться на кімографі (не термопринтері, візуалізується на екрані монітора) або через пьезодатчик на самописці. Недоліком таких вимірювань є великі артефакти від м’язових напружень.
1.2 Імпедансний метод
Також дихальну активність вимірюють за допомогою імпедансного пневмографа. Суть методу полягає в вимірюванні імпедансу, грудної клітки в залежності від наповненості легень повітрям. При вдиху опір тіла змінному струму (50−100 кГц) зростає на 0,2−0,6%, а при видиху він повертається до початкового значення. Імпедансний пневмограф, сконструйований Р.Х. Туш-каїтовим, складається з приставки і самописного пристрою. У портативній приставці вмонтовано генератор струму, зібраний на двох транзисторах; перетворювач високих частот в низькі; смуговий фільтр; джерело живлення — гальванічна батарея. Для реєстрації пневмограми використовують звичайні кардіографічні електроди. Проводами сполучають електроди з приставкою. Електричні сигнали з виходу приставки подаються в записуючий механізм. Як реєстратор можна використовувати електрокардіограф або енцефалограф (краще з чорнильним записом). По пневмограмі можуть бути визначені частота і ритм дихання, тривалість фаз вдиху і видиху, дихального циклу. Імпедансна пневмографія дозволяє, крім того побічно судити про дихальний і хвилинний об'єми. До недоліків даного методу можна віднести те, що через організм людини пропускається електричний струм, порівняно високої частоти, а також потребу в побудові дуже чутливого вимірювального перетворювача (далі ВП) (що пов’язано з малою зміною опору тіла під час дихального циклу).
1.3 Реєстрація зміни температури вдихуваного/видихуваного повітря
Вимірювання частоти дихання здійснюється за допомогою мініатюрного напівпровідникового давача температури. Давач температури поміщений в отвір маски, яка надягає на область рота і носа і, таким чином, дозволяє сконцентрувати потік вдихуваного і повітря, що видихається, в області розміщення давача. Температура повітря, що видихається, близька до температури тіла людини і таким чином вища за кімнатну температуру. Тому при видиху реєстрована давачом температура підвищується, а при вдиху, коли повз давач йде холодніше навколишнє повітря, падає.
Перевагою даного методу є простота в реалізації, оскільки на даний час існує велика кількість давачів температури. З іншого боку, недоліком є потреба у використанні малоінерційних давачів; залежність точності вимірювання від температури навколишнього середовища; а також той факт, що при застосуванні дихальної маски людина концентруватиме увагу на диханні, що може призвести до помилкових даних.
1.4 Індукційний вимірювач лінійних переміщень
В основу принципу дії перетворювача покладена зміна розмірів зрудної клітки під час дихання (розширення при вдиху). ВП складається з двох котушок індуктивності (передаючої та приймальної). Передаюча котушка випромінює електромагнітні хвилі, в результаті чого в приймальній котушці наводиться електрорушійна сила (далі ЕРС) Принцип дії даного перетворювача базується на зміні наведеної в приймальній котушці ЕРС від відстані між котушками (одна з котушок закріплена на спині, інша — на грудях піддослідного). Робоча частота становить близько 5кГц. Даний метод характеризується високою чутливість та точністю вимірювань. До недоліків можна віднести нелінійність передаточної характеристики.
1.5 Вимірювання деформації грудної клітки за допомогою тензорезистора
В основу вимірювання покладено тензоефект — зміна опору дроту (фольги, кристалу напівпровідника) при деформації. Вимірювальний перетворювач представляє собою тонкий дріт, наклеєний на діелектричну основу. при деформації довжина дроту змінюється, а отже змінюється і опір. Суттєвою перевагою даного методу є висока чутливість тензорезисторів (особливо напівпровідникових). До недоліків можна віднести великий розкид параметрів, який пов’язаний із різною статурою пацієнтів.
2 ТИПИ ДИХАННЯ, ЧАСТОТА І ГЛИБИНА, ХАРАКТЕР
ДИХАЛЬНИХ РУХІВ [3]
Для визначення величини дихальної екскурсії грудної клітки вимірюють її окружність на рівні сосків під час спокійного дихання на висоті вдиху і видиху (рис, 2.1).
Рис. 2.1 — Вимірювання окружності грудної клітки | Рис. 2.2 Грудний (а) і черевний (б) типи дихання | |
Особливу увагу звертають на характер дихальних рухів, які у здорової людини здійснюються за рахунок скорочення дихальних м’язів: міжреберних, діафрагмальних і частково м’язів черевної стінки. Розрізняють грудний, черевний (рис. 2.2) і змішаний типи дихання.
При грудному (ребровому) типі дихання, який частіше зустрічається у жінок, дихальні рухи здійснюються за рахунок скорочення міжреберних м’язів. При цьому грудна клітка розширюється і злегка підводиться під час вдиху, звужується і дещо опускається при видиху.
При черевному (діафрагмальному) типі дихання, що частіше зустрічається у чоловіків, дихальні рухи здійснюються переважно діафрагмою. Під час вдиху діафрагма скорочується і опускається, що збільшує негативний тиск в грудній порожнині, і легені заповнюються повітрям. Внутрішньочеревний тиск при цьому підвищується і черевна стінка випинається. Під час видиху діафрагма розслабляється, піднімається, черевна стінка повертається в початкове положення. Під час вдиху черевна стінка може відхилятися від початкового положення на відстань до 5 сантиметрів.
При змішаному типі в акті дихання беруть участь міжреберні м’язи і діафрагма.
Рис. 2.3. Зміни глибини (а) і ритму (б, в) дихання в порівнянні з нормальним (г).
Якщо змінюється частота дихання, міняється і його глибина: часте дихання зазвичай буває поверхневим, зрідження ж супроводжується збільшенням його глибини. Проте бувають і виключення з цього правила. Наприклад, у разі різкого звуження голосової щілини або трахеї (здавлення пухлиною, аневризмою аорти і т. д.) дихання рідке і поверхневе.
При важких ураженнях головного мозку (пухлини, крововиливу), іноді при діабетичній комі дихальні рухи час від часу уриваються паузами (хворий не дихає — апное), що тривають від декількох секунд до півхвилини. Це так зване дихання Біота (рис. 2.3, в).
При важких інтоксикаціях, а також при захворюваннях, що супроводжуються глибокими, майже завжди необоротними порушеннями мозкового кровообігу, спостерігається дихання Чейна — Стокса (рис. 2.3, б).
Дихання здорової людини ритмічне, відрізняється однаковою частотою вдиху і видиху (16 — 20 дихань в хвилину). Дихання дітей частіше та рівне 30−40 дихань в хвилину. Частоту дихання визначають по руху грудної або черевної стінки. При фізичному навантаженні, після їжі дихання частішає, під час сну — рідшає.
При дії на дихальний центр токсичних продуктів, що накопичуються в організмі, при нирковій і печінковій недостатності, діабетичній комі і інших захворюваннях спостерігається рідке, але шумне і глибоке дихання (велике дихання Куссмауля; рис. 2.3, а).
При різних патологіях частота дихання може збільшуватися приблизно вдвічі. Тому діапазон розширюється до значень від 16 до 40 дихань/хв. в дорослих та до 80 разів в дітей. Динамічний діапазон підйому/спаду грудної клітки (стінки черевної порожнини) може складати від десятих долей сантиметра до 5−10 сантиметрів. Тому вимірювальний перетворювач частоти дихання повинен характеризуватися відповідною чутливістю та роздільною здатністю.
3. ПОБУДОВА СХЕМИ ПЕРВИННОГО ВИМІРЮВАЛЬНОГО ПЕРЕТВОРЮВАЧА ТА РОЗРАХУНОК ПАРАМЕТРІВ ЕЛЕМЕНТІВ
3.1 Побудова функціональної схеми ВП
Розглянувши переваги та недоліки згаданих вище давачів вибираємо конструкцію на основі індуктивного вимірювача нелінійних переміщень. Даний перетворювач складається з двох котушок індуктивності. Через одну з них (котушку збудження) протікає змінний струм. В другій (приймальній) котушці за рахунок взаємної індукції наводиться ЕРС індукції магнітного поля. Котушки розміщені одна навпроти одної (на грудях та спині піддослідного), в процесі дихання грудна клітка (черевна порожнина) розширюється та відстань між котушками змінюється. При зміні відстані змінюється і ЕРС магнітної індукції в другій котушці. Оскільки в процесі дихання, в залежності від індивідуальних особливостей організму груди і живіт зносять різний внесок в об'єм вдихуваного повітря (торакальний і абдомінальний внесок) то потрібно спроектувати двоканальний ВП Рис. 3.1 — Схема функціональна ВП частоти дихання
Як видно з рисунка, пристрій складається з двох ідентичних каналів зі спільним блоком живлення. Генератор 1 виробляє синусоїдальну напругу, що підсилюється та поступає на котушку збудження (L1). Для уникнення взаємного впливу каналів частоти мають відрізнятися в 1,5…2 рази. Синусоїдальна форма вибрана для того, щоб не створювати завади за рахунок вищих гармонік.
Права частина схеми (приймальна) містить в собі приймальну котушку (L2), резонансний підсилювач 3, детектор 4 та диференціюючий пристрій 5. За рахунок взаємної індукції в котушці давача (приймальній котушці) наводиться ЕРС. Напруга з котушки подається на резонансний підсилювач 3, налаштований на частоту генератора відповідного каналу. З виходу підсилювача змінна напруга (що, по суті, являє собою амплітудно-модульований сигнал) подається на детектор 4. Через пристрій зсуву нуля (диференціюючий пристрій 5) випрямлена напруга, що залежить від відстані між котушками, подається на вихідний роз'єм приладу («Вихід 1»). Далі вона поступає на осцилограф, самописець, вольтметр або інший реєструючий прилад для візуалізації чи подальшої обробки. Пристрій зсуву нуля служить для установки нульової напруги на виході приладу при переведенні котушки збудження і котушки давача в початкове положення.
Блок живлення БП виробляє необхідну для роботи приладу напругу. Для коректної роботи приладу бажано, щоб блок живлення виробляв стабільну двополярну напругу в діапазоні 5…15 В.
3.2 Розрахунок характеристик передаючої та приймальної котушок
Згідно закону електромагнітної індукції Фарадея, ЕРС, наведена в приймальній котушці обчислюється за виразом [1]:
(3.1)
де Ф — магнітний потік в осерді;
N2 — кількість витків (приймальної котушки).
Згідно теореми Гауса для однорідного поля і плоскої поверхні можемо записати [2]:
(3.2)
де S2 — січення осердя приймальної котушки Перейдемо від магнітної індукції до напруженості магнітного поля. Ці дві величини зв’язані між собою співвідношенням [2]:
(3.3)
(3.4)
де: 0 — магнітна стала (магнітна проникність вакууму). 0 = 410-7 Гн/м
ОС2 — магнітна проникність сердечника приймальної котушки безрозмірна величина;
— напруженість магнітного поля Якщо продиференціювати (3.4) по часу одержимо:
(3.5)
Тепер запишемо, яким чином залежить напруженість магнітного поля в певній точці простору (на заданій відстані від котушки) від параметрів котушки збудження.
Згідно закону Біо-Савара-Лапласа (БСЛ) можемо записати наступне співвідношення [2]:
(3.6)
де: R — відстань між котушкою і точкою, в якій ми хочемо дізнатися
значення магнітної індукції;
і1 — струм, що протікає через котушку збудження. Оскільки котушка живиться змінним струмом, то і1=І10sin2(ft)
I10 — амплітуда струму в котушці збудження;
N — кількість витків котушки збудження;
— магнітна проникність середовища між котушками. Безрозмірна величина. Для немагнітних матеріалів 1.
Продиференціюємо праву і ліву частину рівності по часу. Отримаємо:
(3.7)
Підставивши (3.2) в (3.6) отримаємо:
(3.8)
Враховуючи, що і1=І10sin (2ft) запишемо:
(3.9) | ||
Підставимо (3.9) та (3.5) в (3.1):
(3.10)
Тепер розрахуємо число витків котушок, виходячи з умови, що на відстані між ними рівній 0,5 м в приймальній котушці наводиться ЕРС 2 В (в правій і лівій частині рівності амплітудні значення ЕРС та струму можемо замінити на діючі). Для цього необхідно задатися значеннями величин, яких не вистачає.
— Струм через котушку збудження І10=100мА;
— Частота рівна: для першого каналу f1=4кГц, для другого каналу f2=6кГц;
— Відносна магнітна проникність осердь котушок ОС1=ОС2=600;
— Котушки намотані на осердях круглого січення діаметром 3 мм. Площа поперечного перерізу осердь рівна:
(3.11)
де d — діаметр осердя Добуток числа витків котушок рівний:
(3.12)
де — ЕРС, що наводиться в приймальній котушці. =Е0cos (2ft);
0 — магнітна стала. 0=410-7(Гн/м).
Число витків приймальної котушки приймаємо в 10 разів більшим від числа витків котушки збудження: (N2=10N1).
(3.13) | ||
Для першого каналу:
Для другого каналу:
3.3 Виведення рівняння перетворювача
(3.14)
де k — коефіцієнт, яким визначається чутливість давача;
Е — діюче значення наведеної в приймальній котушці ЕРС.
(3.15)
де І10 — (в даному виразі) діюче значення струму через котушку збудження Множникє однаковим для обох котушок, оскільки збільшення частоти для другого каналу компенсується зменшенням числа витків котушок.
Отже
(3.16)
З даного виразу можна зробити такі висновки:
— Сигнал на виході перетворювача зсунутий відносно вхідного на кут 180о ()
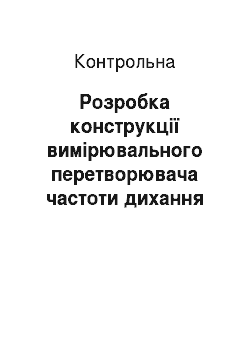
— Напруга на виході має нелінійну залежність від переміщення (гіперболла) Згідно даної рівності будуємо залежність ЕРС від відстані між котушками:
Рис. 3.2 — Передавальна характеристика ВП Як уже говорилося, вихідний сигнал давача являється АМ сигналом з великим рівнем несучої. на наступному рисунку зображено вихідний сигнал перетворювача у випадку, коли відстань між котушками змінюється за законом R=0.50.02cos (2120t) (частота коливань рівна 120Гц, амплітуда коливань рівна 2 см, початкова відстань між котушками 50см).
Для подальшої обробки можна застосувати схему, що включає в себе підсилювач з високоомним входом (не менш як 106 Ом), детектор згинаючої, диференціюючий пристрій (щоб усунути постійну складову).
Рис 3.3 — Вихідний сигнал давача
1 — вхідний сигнал;
2 — вихідний сигнал.
3.4 Обчислення похибки вимірювання
Похибка вимірювання спричинена нелінійністю передавальної характеристики давача. В залежності від початкової відстані між котушками чутливість давача змінюється (на графіку вона визначається дотичною в конкретній точці). Тому даний ВП може коректно працювати лише при невеликих (відносно невеликих) змінах відстані між котушками.
Для обчислення похибки розглянемо ділянку передавальної характеристики при відстані між котушками 0,4±0,05(м).
Рис. 3.4 — Ділянка передавальної характеристики перетворювача
1 — реальна характеристика;
2 — ідеальна характеристика.
За допомогою методу найменших квадратів визначимо, якою повинна бути ідеальна характеристика перетворювача в даній точці.
В результаті виконання математичних дій отримаємо наступне рівняння ідеального перетворювача:
Е= -6.3093 R+ 5.0369 (3.17)
Отже чутливість ідеального перетворювача в даній точці рівна 6,45 В/м Максимальне значення абсолютної похибки рівне: max= 0.0285 В.
Відносну похибку вимірювання знаходимо за виразом:
(3.18)
де — дійсне значення вихідної величини (ЕРС) в даній точці (0,4м).
Отже при початковій відстані між котушками 0,4 м відносна похибка вимірювань рівна 1,14%.
Розрахунок параметрів ВП, а також абсолютної похибки вимірювання був проведений з використанням середовища MATLAB 6.5. текст програми наведений в додатку А.
3.5 Обчислення температурної похибки роботи ВП.
Оскільки проектований ВП повинен працювати в широкому діапазоні температур (від -45 до +45 оС) то значну долю від загальної похибки вимірювання буде складати температурна похибка. Вона виникає внаслідок збільшення магнітної проникності феритового осердя при збільшенні температури.
Визначимо вплив зміни температури на магнітні властивості осердя:
Рис. 3.5 — Залежність магнітної проникності фериту М600НН від температури Як видно з рисунка, у вказаному діапазоні температур магнітна проникність фериту може змінюватися від 470 до 730. абсолютна похибка буде рівна:
max=max-min (3.19)
max=730−470=260
Відносна похибка в такому випадку визначається за формулою (3.18)
Як бачимо, зміна температури навколишнього середовища сильно впливає на результати вимірювання. Щоб усунути це негативне явище при обробці сигналу можна враховувати температуру навколишнього середовища та робити температурну поправку.
Дані похибки впливають лише на форму (амплітуду) дихальної кривої і ніяк не відображаються на частоті коливань. В завданні на самостійну роботу необхідно розробити ВП для вимірювання частоти дихання, тому можна вважати, що даний прилад задовольняє вихідні вимоги.
Щодо похибки в вимірюванні частоти дихання то, за рахунок явища зсуву фаз вихідного сигналу на 180о похибка може складати одне дихальне коливання за весь вимірювальний цикл.
4 КОНСТРУЮВАННЯ ПЕРВИННОГО ВИМІРЮВАЛЬНОГО ПЕРЕТВОРЮВАЧА
4.1 Визначення діаметру дроту обмоток
Діаметр дроту обмотки визначається допустимою густиною струму, що протікає в котушці. Вона, в свою чергу залежить від матеріалу осердя та потужності розсіювання котушки. Потужність розсіювання визначається струмом через обмотку та індуктивним опором обмотки.
4.1.1 Визначення параметрів дроту обмотки котушки збудження
Індуктивність котушки:
[2] (4.1)
де ОС1 — магнітна проникність осердя котушки збудження. ОС1=600
0 — магнітна стала. 0 = 410-7 Гн/м;
N1 — число витків котушки збудження, для першого каналу N1=217;
S1 — площа січення котушки. S1SOC11.5=10.610-6(м2);
l1 — довжина котушки. l1=2510-3(м). (уточнений розрахунок проводиться нижче)
Індуктивний опір котушки рівний:
(4.2)
де f — частота струму в котушці. для першого каналу f=4кГц.
Потужність розсіювання котушки рівна:
P=I102XL (4.3)
де І10 — діюче значення струму в обмотці котушки збудження.
P=0,12377=3,77(ВА) Згідно для даної потужності на високій частоті допускається густина струму в обмотці до 10А/мм2. Оскільки первинний ВП повинен працювати в широкому діапазоні температур, для більшої стабільності вибираємо менше значення густини струму. j1=4А/мм2. Січення дроту без ізоляції визначається з формулою:
(4.4)
Діаметр дроту без ізоляції рівний:
(4.5)
4.1.2 Визначення параметрів дроту обмотки приймальної котушки
Оскільки вихідний опір приймальної котушки дуже великий (більше 106 Ом) то струм, що протікає в обмотці дуже малий (одиниці мікроампер). Тому визначати діаметр дроту так, як в попередньому підрозділі недоцільно. Для обмотки приймальної котушки вибираємо дріт, виходячи з умов забезпечення механічної міцності. Вибираємо дріт діаметром (без ізоляції) 0,05 мм.
4.2 Визначення довжини дроту
Для того, щоб визначити довжину дроту для обмоток котушок (приблизно) потрібно врахувати такі параметри як довжина витка, кількість витків, коефіцієнт нещільності намотки, коефіцієнт розбухання.
Довжина витка визначається за виразом:
l=d (4.6)
де d — діаметр витка. d=5мм
lВ=5=15,7 мм
Тепер запишемо вираз для визначення довжини дроту котушок:
l=NlBkPkH (4.7)
де N — кількість витків відповідної котушки;
kP — коефіцієнт розбухання, для котушки збудження kP1=1,15, для приймальних котушок kP2=1,2 [5];
kH — коефіцієнт нещільності намотки. kH =1,1.
Для котушки збудженн я 1-го каналу:
l11=21715,71,151,1=4309,73(мм)4,31(м)
Для котушки збудження 2-го каналу:
l12=17715,71,151,1=3515,3(мм)3,51(м)
Для приймальної котушки 1-го каналу:
l21=216115,71,21,1=44 784,56(мм)44,8(м)
Для приймальної котушки 2-го каналу:
l22=176715,71,21,1=36 619,3(мм)36,62(м)
4.3 Розробка та опис конструкції вимірювального перетворювача
Зважаючи на широкий діапазон робочих температур для обмоток вибираємо провід ПЭТВ-25 ТУ 16−705.110−79 (дріт емальований, теплостійкий, покритий шаром високоміцної емалі нормальної товщини, діапазон робочих температур -50.+180оС). Діаметр провода з емаллю: 0,22 мм для котушки збудження, 0,09 мм для приймальної котушки.
Котушка намотана на каркасі, діаметр каркаса — 5 мм, довжина каркаса — 25 мм, матеріал — фторопласт-4 ГОСТ 10 007–80.
Осердя виготовлене з фериту М600НН (низькочастотний, нікель-цинковий ферит, початкова магнітна проникність 600, діапазон робочих температур від -40 до +250 оС). Ферит поставляється у вигляді стержнів діаметром 3,5 мм довжиною 45 мм. Отже для виготовлення котушок потрібно розрізати їх надвоє. Довжина осердя котушки становить 22 мм.
Приймальна котушка та котушка збудження закріплена на спеціальному еластичному поясі, який в свою чергу закріплюється грудях пацієнта (перший канал) та на животі в епігастральній області (другий канал). Слід зауважити, що результати вимірювання не залежать від взаємного розміщення котушок (канали можуть мінятися місцями), також вимірювальні канали взаємно не впливають один на одного, оскільки в складі першого каскаду підсилювача є смуговий фільтр, налаштований на частоту відповідного каналу.
Для кріплення котушок використано клей Эласил137−83 ТУ 6−02−1237−83 (клей силіконовий, однокомпонентний, діапазон температур: -60 … +300 оС).
Зовнішні підключення здійснюються за допомогою двожильного кабелю. Для зовнішньої ізоляції використана трубка ТКР ГОСТ 17 675–87 (Матеріал: кремнійорганічна гума, робоча температура: від -50 до +250оС), внутрішній діаметр 3 мм. Жили кабелю виконані дротом МГТФЭ-0,2 ТУ 16−505.185−71 (з мідною жилою та ізоляцією із запечених плівок фюропласта-4 діапазон температур експлуатації від ?60 до 220? С). Ці матеріали забезпечують кабелю широкий діапазон робочих температур та високу гнучкість. Довжина кабелю має становити 1−2м.
Для зовнішньої ізоляцій котушки заливаються кремнійорганічним компаундом типу КЛ-4 ТУ 38,103 691−89 (стійкий до перепадів температур, старіння, дії хімічних реагентів, має хороші діелектричні властивості, діапазон робочих температур від — -60 до + 300 °C.). Товщина шару заливки має складати не менше 3 мм.
Складальне креслення котушки розміщене в додатках (КРО.5.893.01.000 ПЗ). Оскільки всі котушки відрізняються лише довжиною та діаметром дроту котушок то на кожну специфікація оформлена окремо на кожну з них.
ВИСНОВКИ
В ході виконання самостійної роботи було розроблено первинний вимірювальний перетворювач частоти дихання людини. Даний пристрій являється індуктивним вимірювачем лінійних переміщень, має високу чутливість (6,45 В/м) та дозволяє записувати пневмограму не залежно від статі та статури пацієнта. Завдяки використанню термостійких матеріалів в конструкції пристрій може працювати в діапазоні температур від -45 до +45оС.
В самостійній роботі теоретично розраховані похибки вимірювання. Похибка, що виникає за рахунок нелінійності передавальної характеристики складає 1,14% (при відстані між котушками 40±5см). Температурна похибка на всьому діапазоні робочих температур рівна 43,3%. Дані похибки впливають лише на амплітуду дихальної кривої в режимі запису пневмограми, при визначенні частоти дихання похибка вимірювання складає один період за весь цикл вимірювання.
Для обробки даних може використовуватися як аналогова схема з механічним самописцем, так і цифровий прилад з аналоговим входом та АЦП. Зважаючи на велику температурну похибку вимірювального перетворювача для запису пневмограми в вимірювальний прилад (пневмограф) потрібно включити можливість температурної компенсації.
СПИСОК ВИКОРИСТАНИХ ДЖЕРЕЛ
1. http://amfan.ru/priemniki-pryamogo-usileniya/magnitnye-antenny/;
2. .Курс физики: Учеб. пособие для вузов/Трохимова Т. И — М.: Выш. шк., 1990. — 478с.: ил;
3. Основы диагностики синдромов внутренних болезней/Храмов Ю. А: Самиздат в электронном формате PDF, 2008. — 380 с.: ил.;
4. Математичне та комп’ютерне моделювання медтехніки. Методичні вказівки та завдання для практичних занять та тестування/Шадріна Г. М. — Тернопіль: ТДТУ імені Івана Пулюя, 2008. — 70 с.
5. .Источники электропитания радиоэлектронной аппаратуры: Спра-вочник/ Найвельт Г. С. и др. — М.: Радио и связь, 1985 — 576с: ил.
ДОДАТОК А
ПРОГРАМА ДЛЯ РОЗРАХУНКУ ПАРАМЕТРІВ ВИМІРЮВАЛЬНОГО ПЕРЕТВОРЮВАЧА ВИМІРЮВАЧА ЛІНІЙНИХ ПЕРЕМІЩЕНЬ
clear all, clc
%%Розрахунок параметрів вимірювального перетворювача
td=10^(-5); %період дисктетизації
t=[0:td:0.02]; %Вектор часу
F=120; %Частота зміни відстані між котушками
r=0.5+0.02.*sin (2.*pi.*F.*t); %Функція, що описує
%зміну відстані між котушками
I10=0.1; %Амплітудне значення струму в котушці збудження
f=4*(103); %частота струму в котушці збудження
u0=4*pi*(10^-7); %Магнітна стала
u=600; %мангітна проникність осердя приймальної котушки
d2=3*(10^-3); %Діаметр осердя приймальної котушки
S2=pi*(d22)/4; %Січення осердя приймальної котушки
N=2*0.5/(I10.*u.*u0.*S2.*f) %
N1=sqrt (N/10) %Визначення числа витків котушок
N2=N/N1%
k=-I10.*N1.*N2.*u.*u0.*S2.*f; %Визначення коефіцієнта передачі
e=(k./r).*cos (2.*pi.*f.*t); %ЕРС, наведена в приймальній котушці
R=[0.05:0.001:2]; %Вектор відстані між котушками
E=k./R; %ЕРС, наведена в приймальній котушці. Діюче значення
E=abs (E);
%Візуалізація обчислень
figure (1)
plot (t, e,'k', t, r,'r'), xlabel ('t, c.'), ylabel ('E, B')
grid on
figure (2)
plot (R, E,'k'), xlabel ('R, M'), ylabel ('E, B')
grid on
%%Обчислення похибки
R0=0.4; %Середнє значення відстані на заданому проміжку
d=0.05; %Амплітудне значення зміни відстані
dR=[(R0-d):td:(R0+d)]; %Вектор відстані між котушками на
%заданому проміжку
dE=abs (k./dR); %ЕРС, наведена в приймальній котушці на
%заданому проміжку. Діюче значення
% Метод найменших квадратів
%Обчислення сум, необхідних для побудови системи рівнянь
Exi=sum (dR);
Efi=sum (dE);
Exifi=sum (dR.*dE);
Ex2=sum (dR.^2);
n=length (dR);
%Розвязання системи рівнянь
A=[Ex2, Exi; Exi, n]
B=[Exifi; Efi]
kb=inv (A)*B;
k=kb (1:)
b=kb (2:)
F=k.*dR+b;
delta=abs (dE-F);
delta_max=max (delta) %Визначення максимального значення
%абсолютної похибки на заданому проміжку
%Візуалізація обчислень
figure (3)
plot (dR, F,'-.k', dR, dE,'k'), xlabel ('R, M'), ylabel ('E, B')
text (0.31, 3.3, '1')
text (0.305, 3.1, '2')
grid on