Контроль і діагностика електронної побутової апаратури
Для виявлення несправного функціонального елемента переглядаються показники індикаторів першого ступеня і при виявлені індикатора, який показує несправність, переглядаються індикатори наступного ступеня, з'єднані тільки з цим індикатором. Перевірка триває у зазначеній послідовності до тих пір, доки не виявиться несправний первинний функціональний елемент. На рис. 8 наведена схема пошуку… Читати ще >
Контроль і діагностика електронної побутової апаратури (реферат, курсова, диплом, контрольна)
КОНТРОЛЬ І ДІАГНОСТИКА ЕЛЕКТРОННОЇ ПОБУТОВОЇ АПАРАТУРИ
Вступ Контроль і діагностика ЕПА проводиться для оцінки її технічного стану з зазначенням за необхідності місця, виду і причини виникнення дефекту. Під технічним станом ЕПА розуміють сукупність її внутрішніх властивостей, які визначають зміни при виробництві й експлуатації та характеризують відповідність або невідповідність якості апарата вимогам, встановленим експлуатаційно-технічною документацією на цю апаратуру. Технічний стан ЕПА характеризується певними ознаками, які в свою чергу залежать від кількісних та якісних характеристик властивостей апаратури.
Внутрішні властивості ЕПА визначаються сукупністю властивостей взаємопов'язаних і взаємозалежних функціональних елементів, з яких вона складається. Загальна кількість станів, в яких може знаходитись та або інша ЕПА, визначається кількістю функціональних елементів та зв’язків між ними. Діагностика використовується на всіх етапах існування ЕПА — виробництві, експлуатації та у ряді випадків під час проектування. Діагностика є не метою, а засобом підвищення ефективності виробництва під час збирання та налагодження ЕПА, засобом підвищення її надійності в процесі експлуатації. При виробництві задачі діагностики вирішуються під час налагодження апаратури.
1 Структура системи контролю і діагностики Основними елементами системи контролю і діагностики ЕПА є:
— об'єкти діагностування, тобто джерело діагностичної інформації - діагностована ЕПА;
— апаратура, яка діагностує (засіб технічного діагностування) — апаратура, яка виробляє перевірочні дії та подає їх на діагностований об'єкт, і апаратура отримання, переробки та аналізу діагностичної інформації;
— засоби передачі діагностичної інформації;
— споживачі результатів діагностування.
Сукупність перелічених елементів утворюють систему контролю і діагностики ЕПА, яка призначена для визначення її поточного технічного етапу та знаходження несправності з заданою глибиною. Системи контролю і діагностики ЕПА можуть бути різними за своїм призначенням, структурою, місцем встановлення, складом, конструкцією, схемотехнічними рішеннями.
Вони класифікуються за рядом ознак, які визначають їх призначення, склад технічних засобів, структуру, задачі, що віршує система.
Процес діагностування являє собою багаторазові подавання на об'єкт діагностування певних сигналів та багаторазові вимірювання і аналіз реакцій на ці сигнали.
В залежності від засобу подавання на апаратуру діагностування перевірочних впливів розрізняють системи тестового та функціонального діагностуванням (рис. 1 та 2).
Рисунок 1 — Узагальнена схема функціонального діагностування
Рисунок 2 — Узагальнена схема тестового діагностування Системи функціонального діагностування використовують як перевірочні впливи робочі сигнали. Ці впливи відповідають робочим алгоритмам функціонування апаратури і не можуть вибиратися довільно. Це системи вбудованого контролю. За необхідності збільшити глибину пошуку несправностей запроваджують датчики стану дрібніших вузлів.
Системи функціонального діагностування дозволяють виявити відмову будь-якого елемента, оскільки кожен елемент схеми виконує певну функцію. Системи тестового діагностування використовують перевірочні впливи, які виробляються пристроями діагностування. А тому як склад, так і послідовність цих впливів на діагностовану ЕА визначається з умов ефективності контролю та діагностики. При цьому для отримання впливів і реакцій відгуку можна використовувати не тільки основні входи і виходи апаратури, а також внутрішні вузли і ланцюги. Це сприяє отриманню більшої глибини пошуку дефектів при менших витратах часу і обладнання. При пошуках несправностей ЕПА зазвичай показують у вигляді функціональної моделі або функціонально-логічної схеми. Функціональна модель відрізняється від структурної схеми вибором первинних функціональних елементів. Під функціональними елементами розуміють частину апаратури діагностування (вузол, каскад, електрорадіоелемент), яка може знаходитись тільки в одному з двох станів: справна або несправна. Як показує практика, діагностування слід вести до елемента, який відмовив. При цьому пошуки несправностей необхідно проводити послідовно на різних рівнях: блок — модуль — каскад, ЕРЕ. А тому і функціональних моделей будують декілька: для пристрою в цілому з глибиною пошуку несправності до блока або модуля, для кожного блока або модуля з глибиною пошуку до каскаду або окремого ЕРЕ.
Вихідними даними для побудови функціональної моделі є:
— функціональна схема ЕА контролю і діагностики:
— принципова схема ЕА контролю і діагностики;
— опис процесів, які протікають в апаратурі діагностування;
— задана глибина пошуку несправності.
Під час побудови функціональних моделей слід керуватися правилами:
— у кожному елементі мають бути відомі значення (номінальні, припуски) вхідних і вихідних параметрів, їх функціональна залежність і засіб контролю;
— при виході за допустиму межу хоча б одного із вхідних сигналів з’явиться вихідний сигнал, який також виходить за допустиму межу;
— функціональний елемент моделі об'єкта діагностування вважається несправним, якщо при всіх вхідних сигналах, які знаходяться у допустимих межах, на його виході з’явиться сигнал, значення якого виходить за допустиму межу;
— значення зовнішніх вхідних сигналів завжди знаходяться в межах припусків;
— якщо вихідний сигнал і-го елемента є вхідним для j-го функціонального елемента, то значення цих сигналів збігаються;
— лінії зв’язку між функціональними елементами абсолютно надійні;
— будь-який первинний функціональний елемент моделі може мати тільки один вихідний сигнал за довільною кінцевою кількістю вхідних сигналів. Функціональна модель виконується у вигляді графічної схеми, на якій кожен функціональний елемент позначається прямокутником з деякою кількістю вхідних стрілок (вхідним сигналом) і однією вихідною стрілкою (вихідним сигналом).
Вихід будь-якого функціонального елемента можна з'єднати з будь-якою кількістю входів, у той час як вхід кожного елемента може бути з'єднаний тільки з одним виходом.
Входи, які не з'єднані з жодним виходом, називаються зовнішніми. Вони передають зовнішні впливи на діагностований апарат. Зовнішні впливи позначають Xij, де і - номер функціонального елемента, а j — номер входу цього елемента. Виходи функціональних елементів позначаються Zі, де і - номер функціонального елемента. Через Si позначається стан функціонального елемента (рис. 3).
Рисунок 3 — Функціональна модель каналу звукового супроводу телевізора типу УПMKT
Після побудови функціональної моделі визначається безліч можливих станів апарата діагностування. Загальна їх кількість під час його розподілу на N функціональних елементів при двоальтернативних результатах для кожного елемента дорівнює (2N-1). Але у високонадійних пристроях, до яких відносяться і ЕПА, одночасна поява двох незалежних відмов малоймовірна. Тоді кількість можливих станів діагностованої ЕА можна визначити як кількість сполучень N елементів по одному:
CN = N. (1)
Кількість різних станів діагностованої апаратури з урахуванням відмов одного елемента зводиться в таблицю станів або матрицю несправностей. У таблиці кількість рядків дорівнює кількості функціональних елементів моделі, а кількість стовпчиків — кількості контрольних точок (вихідних елементів). Матриця несправностей заповнюється на основі логічного аналізу функціональної моделі діагностованої апаратури за умови, що всі параметри в контрольних точках на виходах елементів контролюються. При цьому припускається, що якщо діагностована апаратура знаходиться у Si стані, несправний тільки і-й функціональний елемент. Цьому випадку відповідає недопустиме значення вихідного параметра Zі, і тоді на перетині Si-рядка і Zі-стовпчика записується символ О. Якщо при цьому будь-який інший j-й функціональний елемент має також недопустиме значення ZJ, то на перетині Si-рядка і Zі-стовпчика також записується символ О. Якщо ж значення параметра знаходиться у припуску, то на перетині записується символ 1.
На прикладі функціональної моделі каналу звукового супроводу телевізора (рис. 3) побудуємо матрицю несправностей (табл. 1).
Таблиця 1 — Матриця несправностей для функціональної моделі каналу звукового супроводу телевізора
Sі | Zі | |||||||||
Z1 | Z2 | Z3 | Z4 | Z5 | Z6 | Z7 | Z8 | Z9 | ||
S0 | ||||||||||
S1 | ||||||||||
S2 | ||||||||||
S3 | ||||||||||
S4 | ||||||||||
S5 | ||||||||||
S6 | ||||||||||
S7 | ||||||||||
S8 | ||||||||||
S9 | ||||||||||
Матриця несправностей, яку ми отримали, використовується для розробки програми пошуку несправностей.
2 Вибір параметрів для контролю і діагностики Параметром вважають величину, характеристику, функціональну залежність, які визначають технічний стан системи, апаратури, блока, елемента. Контрольовані параметри описуються такими властивостями:
— номінальним значенням і полем припусків (границями);
— залежністю значення параметра від зовнішніх умов;
— потрібною точністю виміру;
— функціональними залежностями (тобто формули для обчислення значення параметрів за результатами виміру побічних величин).
Кожен вид ЕПА характеризується певною множиною параметрів. При цьому серед численності параметрів є підмножина (), яка визначає працездатність ЕПА в цілому. Такі параметри називаються визначальними. А тому для їх визначення вимірюють допоміжні параметри (), які пов’язані з ними цілком визначеними залежностями:
(2)
де К =1,2…, n; і = 1,2,…
За ступенем узагальнення інформації про технічний стан діагностованої апаратури параметри поділяють на первинні, вторинні, проміжні.
Первинні параметри мають найнижчий ступінь узагальнення і є параметрами елементів діагностичної ЕА.
Вторинні параметри мають найвищий ступінь узагальнення інформації про структуру і працездатність діагностованої ЕПА і є параметрами вихідних функцій об'єктів діагностування. Зазвичай це визначальні параметри.
Проміжні параметри дозволяють здійснити зв’язок між вторинними і первинними параметрами.
Кількість контрольованих параметрів визначається задачами контролю і діагностики.
Працездатність ЕПА характеризується декількома визначальними параметрами, за якими оцінюються її можливості виконувати задані функції.
Під час прогнозування працездатності необхідна детальна інформація про стан вузлів, блоків, каскадів і елементів, що потребує контролю великої кількості параметрів. При цьому необхідно знати не тільки стан елементів, каскадів, модулів, значення їх параметрів, а й закони зміни параметрів. Конструкція ЕПА в цілому, її блоки та модулі мають забезпечувати якісне проведення автоматизованого і автоматичного контролю. Для цього всі блоки і вузли її повинні монтуватися так, щоб кожен з них виконував тільки визначені функції, маючи мінімум функціональних зв’язків, які дозволяють скоротити кількість контрольних точок і параметрів, які перевіряються. Апаратура повинна мати прості види регулювань і мінімальну їх кількість, а також необхідні контрольні виводи, з'єднувачі для перевірки параметрів і пошуку несправності, які забезпечують зручне і надійне підключення апаратури контролю.
Допусками називають максимально допустиме відхилення параметрів від номінальних значень, при яких порушується працездатність ЕА. Значення контрольованого параметра можна записати:
(3)
де yН — номінальне значення параметра; - допуск.
Відомо, що безвідмовність ПЕА можна розглядати як добуток надійності Р1, яка характеризує відсутність раптових відмов, і надійність Р2, яка характеризує знаходження вихідних параметрів у межах допусків.
(4)
Таким чином, одним зі шляхів підвищення безвідмовної роботи ЕА є обґрунтований вибір допусків параметрів з урахуванням усіх факторів.
Допуски на параметри ЕПА поділяються на виробничі та експлуатаційні.
Виробничими допусками називають границі зміни параметрів при виробництві ЕПА, які обмежені максимально допустимим відхиленням їх від номіналів і забезпечують працездатність ЕПА під час експлуатації.
Ці допуски визначають точність процесу виробництва, технологію збирання, правила регулювання і точність контрольно-вимірювальної апаратури. Виробничі допуски описуються нормальним законом розподілу. Виробничі допуски параметрів завжди мають бути більшими їх виробничих похибок.
Експлуатаційними допусками називають границі зміни параметрів експлуатації, які обмежені максимально допустимими відхиленнями їх від номіналів, при яких зберігається працездатність ЕПА. Від експлуатаційних допусків суттєво залежить правило регулювання. Технічне обслуговування, точність контрольно-вимірювальної апаратури.
Експлуатаційні допуски на вихідні параметри ЕПА складаються із суми допусків: виробничого, температурного та допуску старіння, тобто є сумою трьох випадкових величин
(5)
де, , — половина поля допусків відповідного вихідного параметра.
Температурний допуск характеризує границі зміни параметра при заданому перепаді температур. Зміни параметра під впливом температури можна подати у вигляді:
(6)
де — значення параметра при t=(205)С;
— температурний коефіцієнт даного параметра, який характеризує відносну зміну його при нагріванні елемента на 1оС;
t2 і t1 — кінцева і початкова температура.
Допуском на старіння називають граничні зміни параметрів від старіння за визначений інтервал часу експлуатації, за якою зберігається працездатність ЕПА. У загальному вигляді зміна параметра від старіння елементів апаратури:
(7)
де Сст=?у/у — коефіцієнт старіння;
?у — зміна параметра за 1 годину;
у — значення параметра в момент виготовлення ПЕА;
ТС — повний час існування апаратури, включаючи зберігання та термін її роботи, який передбачений документацією.
У реальних умовах розподіл відхилення параметрів в результаті зміни температури і старіння можна вважати нормальним. Тоді експлуатаційні допуски на параметри
=3,
де — середньоквадратичне відхилення параметра у;
— половина поля допуску.
Експлуатаційні допуски вихідних параметрів ЕПА вибирають з умов виконання апаратурою покладених на неї функцій. Слід враховувати, що розкид параметрів у кінці терміну служби у декілька разів перевищує розкид параметрів на початку її експлуатації.
Допуски на визначальні параметри ЕПА визначаються основними функціями, які виконує ця апаратура. В загальному вигляді визначальний параметр пов’язаний з допоміжними залежностями.
(8)
Тоді для знаходження визначального параметра у достатньо виміряти допоміжні параметри та вирахувати значення функції F. З урахуванням формули (3) запишімо наведену рівність (8) у вигляді:
(9)
Якщо враховувати, що в реальній апаратурі і і при цьому розкласти в ряд Тейлора вираз (9) в околі номінальних значень, а також нехтуючи членами другого порядку малості, отримаємо, що зміна вихідного параметра дорівнює:
(10)
У цьому виразі значення частинних похідних є коефіцієнтами впливу допоміжних параметрів на визначальний параметр, тобто це вагові коефіцієнти.
Якщо допоміжні параметри однаково впливають на визначальний параметр, тоді з рівняння (10) отримаємо не суму, а добуток:
(11)
Позначимо коефіцієнти впливу і-го допоміжного параметра на визначальний через vi, тобто:
.
Тоді матимемо, що зміна вихідного параметра дорівнює половині допуску:
Звідси допуск на допоміжний параметр можна визначити за формулою:
(12)
електронний побутовий апаратура де — вагові коефіцієнти допоміжних параметрів (для конкретної апаратури визначають експериментально, або за розрахунками);
— значення допуску на визначальний параметр.
Таким чином, допуски на визначальні параметри визначаються функціями, які виконує апаратура, а допуски на допоміжні параметри встановлюють за допусками визначальних параметрів.
3 Способи побудови алгоритмів пошуку несправностей При побудові алгоритмів пошуку несправностей розрізнюють: послідовний, комбінаційний і комбінаційно-послідовний методи використання діагностичної інформації. Розглянемо їх.
При послідовному методі інформація про технічний стан окремих функціональних елементів діагностованої апаратури вводиться в систему контролю і діагностики та логічно обробляється послідовно. При цьому методі використання діагностичної інформації програма пошуку несправностей може бути жорсткою та гнучкою. Жорсткою називають програму пошуку, коли вихідні параметри функціональних елементів контролюються за суворою, раніше визначеною послідовністю незалежно від результатів їх контролю.
Гнучкою називають програму, при використанні якої зміст та послідовність проведення наступних перевірок залежить від результатів попередньої.
При комбінаційному методі використання діагностичної інформації результати контролю логічно обробляються тільки після накопичення інформації про всі параметри діагностованої ЕА.
Комбінаційно-послідовний метод передбачає послідовну обробку інформації, яку отримали за результатами одночасного контролю декількох з усієї сукупності контрольованих параметрів діагностованої апаратури. При розробці алгоритму пошуку вирішуються дві задачі:
— визначають найкращий набір контрольованих параметрів;
— отримують найкращу послідовність вимірювання контрольованих параметрів.
Розглянемо найбільш поширені способи побудови алгоритмів пошуку несправностей ЕПА.
3.1 Спосіб послідовного функціонального аналізу При побудові алгоритму цим способом заздалегідь визначаються основні функції, які характеризують справність діагностованої апаратури, наприклад:
— приймання і перетворення сигналів заданої частоти;
— генерування коливань;
— управління;
— електричного живлення.
Для всіх фізичних параметрів електронної ПА відомі допустимі границі їх зміни. Отже, контроль працездатності складається з контролю параметрів, від яких залежать основні функції.
Якщо яка-небудь основна функція не виконується, то виникає задача пошуку несправності. В цьому випадку параметр, значення якого вийшли за границі допусків, треба вважати функцією деяких інших параметрів, які є фізичними параметрами дрібніших пристроїв (елементів).
Продовжуючи аналогічні міркування, складається схема контролю працездатності та пошуку несправностей.
Розглянемо складання алгоритму пошуку несправностей до каскаду на приладі каналу звукового супроводу телевізора типу УПІМКТ (рис. 4).
Рисунок 4 — Модель каналу звукового супроводу телевізора Основною функцією цього каналу є підсилення і перетворення сигналу звукового супроводу. Ця функція виконується, якщо при сигналі з фіксованими параметрами на виході спостерігатиметься цілком визначений сигнал.
У процесі контролю цього сигналу приймається рішення про справність або несправність каналу. Послідовно контролюючи сигнали на виході кожного каскаду, можна визначити несправний каскад. При цьому схему пошуку, яку ми отримали, називають деревом функції, а рішення являє собою зазвичай вигляд матриці (рис. 5).
Рисунок 5 — Схема пошуку несправності
Матриця несправності
Позначення за схемою Рішення
Р0 канал звуку справний;
Р1 несправний підсилювач ЗЧ;
Р2 несправний регулятор звучності;
Р3 несправний фільтр;
Р4 несправна мікросхема;
Р5 несправна схема регулятора звучності;
Р6 несправна інтегральна мікросхема;
Р7 несправний контур 6,5 МГц;
Р8 несправний контур частотного дискримінатора.
Спосіб послідовного функціонального аналізу побудови алгоритму контролю працездатності та пошуку несправності простий, наочний, потребує мінімальну кількість інформації від діагностованої ЕА. Але отриманий з використанням цього способу алгоритму пошуку несправності не оптимальний ні за часом, ні за середніми витратами.
3.2 Спосіб половинного розподілу Спосіб половинного розподілу часто використовується при розробці алгоритмів пошуку несправності в електронній ПА з послідовно з'єднаними елементами. Розглянемо два випадки. 1. Діагностована апаратура складається з N послідовно з'єднаних функціональних елементів і може бути непрацездатною через відмову і-го елемента (і = 1,2, .n). Ймовірності станів Р (Si) однакові для всіх функціональних елементів, вартість контролю вихідних параметрів Zi також однакова. За цих умов першим потрібно контролювати параметр, який несе максимальну кількість інформації про стан діагностованої апаратури, невизначеність стану якої до контролю оцінюється величиною ентропії
. (13)
Знак мінус перед сумою (3) ставиться для того, щоб при О
<1ентропія була величиною позитивною. Таким чином, доцільно контролювати такий параметр Zк, який розподіляє об'єкт діагностики навпіл, тобто щоб величина ентропії H (ZК.)=Ho/2 при позитивних і негативних результатах контролю. Кожен наступний параметр для контролю вибирається аналогічно, тобто розділяють навпіл систему, яка утворилася після виконання попередньої перевірки, в залежності від результату її наслідків.
Розглянемо приклад.
Для функціональної схеми супергетеродинного приймача, яка наведена на рис. 3, способом половинного поділу побудувати алгоритм пошуку несправностей.
Розв’язання. Оскільки діагностований апарат складається з парної кількості функціональних елементів, першим контролюється параметр Z3, який розбиває діагностований апарат навпіл. При позитивному результаті
(Z3 знаходиться у допустимих гранях) приймають, що функціональні елементи 1, 2, 3 і 8 справні, а несправність знаходиться у функціональних елементах 4,5,6 або При цьому наступним елементом, який контролюватиметься, є Z5 і тощо. За негативного результату параметра Z3 наступним контролюється параметр Z2 тощо.
У результаті отримуємо схему пошуку несправностей в діагностованому апараті, яка наведена на рис. 7
Рисунок 7 — Схема пошуку несправності у приймачі
2. У цьому випадку ймовірності стану Р (Si) для функціональних елементів неоднакові, тоді необхідно контролювати такий параметр Zk, який розподіляє об'єкт діагностики на частини, ймовірність стану яких наближається до 0,5.
При цьому невизначеність стану діагностованого апарата при контролі параметра Zk оцінюватиметься величиною ентропії.
(14)
де ;
Величина ентропії Н (Zk) матиме максимальне значення, якщо різниця
Рк — 0,5 мінімальна.
Після контролю параметра Zk діагностований апарат буде розподілений на дві частини: перша містить К елементів, а друга частина N — k. При виборі чергового параметра для контролю необхідно ймовірність стану в кожній з цих частин пронормувати, за формулами:
;. (15)
;. (16)
При цьому
і. (17)
Тоді другим параметром вибирається Zі, який поділяє одну з частин на дві, ймовірності станів яких. Такий розподіл продовжується до того часу, доки стан діагностованого апарата не буде визначений із заданою глибиною.
Спосіб половинного розподілу можна застосовувати і для випадків, коли в діагностованої апаратурі несправні декілька елементів.
3.3 Спосіб «час — ймовірність»
Цей спосіб знайшов застосування в електронній апаратурі, де функціональні елементи з'єднані довільно і мають різні ймовірності Р (Si) станів та різну вартість проведення контролю параметрів B (Zi). Ефективність способу оцінюється середнім часом пошуку несправного елемента або середнім часом контролю одного параметра.
Для визначення несправного елемента вибирають набір параметрів, які забезпечують пошук до заданої глибини. Послідовність контролю параметрів встановлюється у порядку зменшення величин:
. (18)
Алгоритм, побудований за таким способом, має мінімальний середній час пошуку будь-якого несправного елемента. Для розв’язання такої задачі необхідно знати середній час пошуку несправностей елементів t1, t2,…tN, а також ймовірність станів Р (Si).
Як приклад візьмемо функціональну модель приймача, наведену на
рис. 6, для якої задані параметри:
1.; ;; ;; ;; .
2.;; .
Розв’язання. Розраховуються відношення:
P (S1)/t1=0,½=0,05; P (S2)/t2=0,25/0,5=0,5;
P (S3)/t3=0,05/1=0,05; P (S4)/t4=0,08/2=0,04;
P (S5)/t5=0,1/1=0,1; P (S6)/t6=0,15/0,5=0,3;
P (S7)/t7=0,17/1=0,17; P (S8)/t8=0,1/0,5=0,2;
Розміщуючи в порядку зменшення величини Р (Si)/t1, отримаємо послідовність контролю параметрів:
.
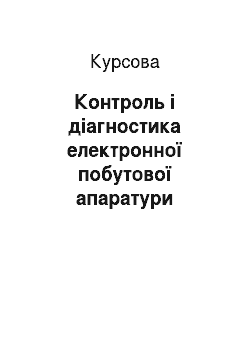
3.4 Спосіб на основі ієрархічного принципу Побудову алгоритму діагностування за ієрархічним принципом доцільно використовувати для електронної ПА з вбудованими пристроями контролю. За даним способом N первинних функціональних елементів діагностованого апарата розбивається на К груп по N1елементів у кожній групі. Вихідні параметри первинних функціональних елементів об'єднуються в одній несправності. Таких індикаторів буде К штук. Останні ще розбиваються на r групи по N2 штук.
Виходи індикаторів кількістю N2 знов об'єднуються в одній точці з одним індикатором. Таких індикаторів буде r штук тощо. В результаті прийдемо до одного індикатора несправності. В такій системі при виході з ладу функціонального елемента діагностики індикатор покаже несправність діагностованого елемента (блока).
Для виявлення несправного функціонального елемента переглядаються показники індикаторів першого ступеня і при виявлені індикатора, який показує несправність, переглядаються індикатори наступного ступеня, з'єднані тільки з цим індикатором. Перевірка триває у зазначеній послідовності до тих пір, доки не виявиться несправний первинний функціональний елемент. На рис. 8 наведена схема пошуку несправностей за ієрархічним принципом. Пошук несправного первинного функціонального елемента за наведеною схемою дозволяє скоротити час пошуків порівняно з пошуком серед N елементів. За однаковою ймовірністю відмов функціональних елементів, однаковим часом перегляданням індикаторів несправності та ймовірності пропуску несправного елемента, рівного нулю [P (N)=0], оптимальною за часом є бінарна система пошуку несправності.
За ймовірності пропуску несправного елемента P (N)0 і такого самого припущення мінімальний середній час пошуку несправності можна визначити як
(19)
де .
За Р (N)0 та досягає мінімального значення при Z= 4. Звідси кількість ступенів ієрархії:
. (20)
Рисунок 8 — Схема пошуку несправностей за ієрархічним принципом
4 Оцінка стану ЕА методом математичної логіки Оцінка стану систем, які являють собою сукупність функціонально пов’язаних блоків (модулів, інтегральних схем тощо), може ефективно здійснюватися з застосуванням так званих логічних моделей — методами математичної логіки. Кожен блок, будь-якої системи має вхідні і вихідні сигнали. Особливістю блоків логічної моделі стає те, що вони можуть мати входів і тільки один вихід (рис.9).
Рисунок 9 — Логічна модель блока До вхідних сигналів можуть відноситися сигнали управління, тест-сигнали, сигнали з виходів інших блоків, входи, які забезпечують живлення блока тощо.
При побудові логічних моделей всі зв’язки між входами зберігаються такими самими, як і в реальній функціональній схемі. Вхідні і вихідні сигнали в логічних моделях вважаються логічними змінними, які приймають значення 1, якщо вони знаходяться в допустимих границях, і значення 0 — у протилежному випадку.
Логічна функція виду
(21)
характеризує наявність вхідних сигналів, де. Якщо всі вхідні сигнали блока «В допуску», вважається, що, у випадку, якщо хоча б один із вхідних сигналів не знаходиться в межах допуску.
Аналогічне припущення робиться і до відношення блока — «Блок справний», — «Блок несправний».
Кон’юнкція змінних
(22)
означає, що блок функціонує нормально (), а всі його вхідні сигнали в допуску ().
Логічне висловлювання «Система справна» відносно системи, яка складається з блоків, істинно тільки у випадку, коли
. (23)
Оцінка стану системи за допомогою логічних моделей застосовується тільки тоді, коли між блоками є функціональні зв’язки. Знаходження мінімальної сукупності вихідних параметрів (ознак), контроль яких при випробуванні ЕА дозволяє розпізнавати всі можливі стани системи, є кінцевою метою побудови логічної моделі.
Методику оцінки стану системи і пошуку блоків, які відмовили, розглянемо на прикладі логічної моделі, наведеної на рис. 10. При цьому вважатимемо, що всі вхідні сигнали блоків знаходяться в допустимих межах.
Рисунок 10 — Логічна модель блоків ЕА Визначимо мінімальний набір ознак, які дозволяють оцінити працездатність всієї системи.
Для знаходження мінімального набору ознак, що дозволяє здійснити пошук блока, який відмовив, складемо таблицю, в якій по горизонталі розташовується стан системи, а по вертикалі - відповідні цим станам ознаки. Таблиця заповнюється так.
Припустимо, що відмовив блок. При такій події відмови. Функціювання блоків та не залежить від відмови блока. А тому вважатимемо, що. У випадку відмови блока. Таким чином можно заповнити стовпчики за станами та .
Таблиця 2 — Матриця несправності логічної моделі
Аналіз матриці несправності логічної моделі показує, що стани, які відповідають відмовам блоків, однозначно відрізняються: однакових стовпчиків за набором ознак немає. Крім того, виявилося, що набір ознак є мінімальним, що дозволяє відрізнити один від одного всі стани системи, включаючи працездатний стан (табл. 2).
Таблиця 3 — Матриця мінімального набору ознак
Використання матричних (табличних) методів опису станів системи електронних засобів дозволяє порівняно просто автоматизувати процеси їх контролю. Як основні елементи в подібних автоматизованих пристроях контролю використовуються логічні елементи компоратори (порівняльні пристрої), пристрої запам’ятовування ЗП та індикатори відображення інформації про стан системи .
За даними табл. 2 можна побудувати логічний автомат контролю, схема якого наведена на рис. 11. У цій схемі, та — допустимі значення ознак, та .
Рисунок 11 — Схема логічного автомата контролю несправності
У випадку, коли мінімальний набір ознак одразу не виявляється, з таблиці станів та ознак необхідно вибрати сукупність ознак, які дозволяють попарно розрізнити всі стани системи.
Методику попарної різниці станів пояснимо на прикладі табл. 4.
Таблиця 4 — Матриця несправностей логічної моделі
Сукупність ознак, які відрізняють всі стани один від одного запишемо у такому вигляді:
Одночасна поява всіх перелічених незалежних подій дорівнює добутку станів
·
·. (24)
Як мінімальний набір ознак для контролю системи можна взяти або .
При перемноженні логічних змінних у (14) потрібно застосовувати правила алгебри логіки
(25)
а також правило поглинання. Останнє формулюється так: якщо у дужці з диз’юнкціями ознак є хоча б одна ознака з індексом, аналогічним індексу ознаки перед дужкою, то всю дужку можна поглинути (викреслити), тобто
. (26)
Вище були наведені приклади найпростіших об'єктів контролю, перевірку параметрів яких легко здійснити за допомогою звичайних вимірювальних приладів та оцінити їх стан.
Для об'єктів контролю з десятками різних станів вирішення такої задачі викликає труднощі навіть при використанні логічних алгоритмів контролю. Широке впровадження в технологічні процеси виробництва ПЕОМ дозволяє автоматизувати операції оцінки стану складних об'єктів контролю.
5 Інтегральні методи діагностики ЕПА З усіх методів діагностування ЕА найбільш ефективним є інтегральні методи, які використовують інформацію, що отримують у динамічному режимі роботи апаратури. Інтегральні методи діагностики базуються на використанні інформації, яку отримали на основі порівняння виміряних значень параметрів діагностованої апаратури з параметрами еталонної моделі. Розглянемо один з методів.
5.1 Метод діагностики на основі «білого шуму»
Цей метод дозволяє визначити відгук діагностованої системи під час її нормальної роботи, тобто без відключення. Відомо, що для «білого шуму» автокореляційна функція дорівнює нулю при всіх значеннях, окрім точки, де випадкова функція помножується сама на себе:
(27)
де — напруга «білого шуму» на вході діагностованої системи.
Нагадаємо, що автокореляційна функція (інколи її називають кореляційною) — це другий змішаний центральний момент випадкових величин та або математичне сподівання добутку відхилення випадкових величин від їх математичних сподівань.
Зв’язок між напругами входу та виходу діагностованої системи через відгук визначається рівнянням:
. (28)
Відомо, що взаємна кореляційна функція входу та виходу системи виражається через автокореляційну функцію
. (29)
Після того, як аргументи і, поміняти місцями, отримаємо
. (30)
Якщо на вхід системи подати стимулюючу напругу, яка описується дельта-функцією
(31)
рівняння (28) значно спрощується і напруга на виході системи стає рівною відгуку діагностичної апаратури
. (32)
Із порівняння виразів (28), (30) і (32) випливає, що при подачі на вхід діагностованої апаратури сигналу у вигляді «білого шуму», кореляційна функція якого є дельта-функція, взаємно кореляційна функція входу і виходу дорівнюватиме відгуку системи:
. (33)
Рівність (32) дозволяє синтезувати схему, яка за допомогою корелятора може визначити відгук системи за напругою «білого шуму» на її вході (рис. 12).
Рисунок 12 — Схема визначення відгуку діагностованої системи Якщо на вхід діагностованої апаратури окрім «білого шуму» подати напругу, то на її виході отримаємо симарний сигнал
(34)
де — напруга шуму на виході апаратури;
— напруга, яка з’являється на виході контрольованої апаратури після проходження через неї сигнала .
Взаємно кореляційна функція від напруг та дорівнює нулю, оскільки напруга на вхід корелятора не подається.
Для автоматичного отримання взаємно кореляційної функції, а отже, і відгуку необхідно використовувати схему, яка дозволить визначити відгук діагностованої апаратури за будь-якого зовнішнього сигналу на її вході.
За отриманою функцією ваги діагностованої апаратури можна тепер визначити поточні параметри діагностованого блока (елемента).
Слід зазначити, що контроль і діагностування, виготовлення та експлуатація діагностичної апаратури потребує значних матеріальних витрат, які можуть бути визнані раціональними тільки за умов досягнення визначеного позитивного ефекту. При цьому ефективність діагностики необхідно оцінювати ще на етапі розробки побутової ЕА та діагностичної апаратури.