Автоматизированный електропривод механізму переміщення столу продольно-строгального станка
На малюнку 5 приведено схема силовий частини електропривода з номінальним струмом 800, 1000 При напрузі 220, 440 У. Захисні автоматичні вимикачі QF1, QF2 встановлено послідовно з тиристорами. Для неоперативного відключення електродвигуна від тиристорного перетворювача (ТП) використовується рубильник QS. Силовий трансформатор ТМ приєднується до високовольтної мережі 6 чи 10 кВ через шафу… Читати ще >
Автоматизированный електропривод механізму переміщення столу продольно-строгального станка (реферат, курсова, диплом, контрольна)
Процес обробки деталі на продольно-строгальном верстаті поясняет.
рис. 1. Зняття стружки надається протягом робочого (прямого) ходу, при зворотному русі різець піднято, а стіл переміщається на підвищеної швидкості. Подача різця виробляється періодично від індивідуального приводу під час холостого ходу столу напрямку. Бо за строгании різець відчуває ударну навантаження, то значення максимальних швидкостей, стругання вищими за 75−120 м/мин (на відміну швидкостей точения і шлифования 2000 м/мин і більше). Під швидкістю стругання (різання) розуміють лінійну швидкість Uпр переміщення закріпленої на столі деталі щодо нерухомого різця на інтервалі робочого ходу столу. У цьому швидкість входу різця на метал і швидкість виходу різця з металу у порівнянні зі швидкістю стругання обмежуються до 40% і менше залежно від оброблюваного матеріалу, щоб уникнути скалывания крайки. Зазначені обставини обмежують продуктивність і її підвищення залишається тільки скоротити непродуктивне час руху: зворотний хід складає підвищеної швидкості Uоб > Uпр, а пускотормозные режими при реверсі приймають припустимо мінімальної тривалості. Хороший ефект у тому дає двухдвигательный привід. Вона має бути керованим за швидкістю, бо різних матеріалів (відповідно до технологією обробітку грунту і властивостями матеріалів) використовуються різні оптимальні чи максимально допустимі швидкості стругання; ще, рух характеризується різними швидкостями різними інтервалах часу робочого циклу, високої частотою реверсування з більшими на пускотормозными моментами. Застосовують двохі одно-зонное управління скоростью.
1 ВИХІДНІ ДАННЫЕ.
Таблиця 1.
Вихідні данные.
Вихідні дані Умовні позначення Значение.
Зусилля різання Fz 170 000 Н.
Швидкість робочого ходу Vпр 0,4 м/с.
Швидкість зворотного ходу Vобр 0,8 м/с.
Маса столу mc 15 000 кг.
Маса деталі mд 23 000 кг.
Радіус провідною шестерні rш 0,25 м.
Довга деталі Lд 4 м.
Шлях підходу деталі до різцю Lп 0,2 м.
Шлях після виходу різця з металу Lв 0,15 м.
Коефіцієнт тертя столу про направляючі? 0,06.
ККД механічної передачі при робочої навантаженні ?пN 0,95.
ККД механічних передач при переміщенні столу на холостому ходу? пхх 0,5.
Завдання до проекту:
Для механізму переміщення столу продольно-строгального верстата вибрати тип електропривода, виконати вибір електродвигуна та її перевірку по нагріванню і перевантаження, вибрати силовий преосвітній агрегат, силовий трансформатор і реактори, виконати розрахунок елементів системи автоматичного управління електроприводом, виконати комп’ютерне моделювання системи автоматизованого електропривода в типових режимах.
Вимоги до электроприводу:
1. Забезпечення роботи механізму з такого циклу:
• підхід деталі до різцю зі зниженою скоростью;
• врізування на зниженою скорости;
• розгін до робочої швидкості прямого хода;
• різання зі швидкістю прямого хода;
• уповільнення до зниженою швидкості до виходу резца;
• вихід різця з детали;
• уповільнення до остановки;
• розгін у напрямі до робочої швидкості зворотного хода;
• повернення столу на холостому ходу зі швидкістю зворотного хода;
• уповільнення до зупинки (стіл повертається у початкове положення). Знижену швидкість прийняти: Vпон = 0,4· Vпр
2. Забезпечення рекуперації енергії в гальмівних режимах.
3. Розгони і уповільнення маємо проходити з сталістю прискорення. Забезпечення максимально можливих прискорень в перехідних режимах.
4. Статична помилка за швидкістю при різанні має перевищувати 10%.
5. Обмеження моменту електропривода при механічних перегрузках.
2 ВИБІР ТИПУ ЭЛЕКТРОПРИВОДА.
Заданим вимогам відповідає регульований електропривод з двигуном постійного струму незалежного порушення та замкнутої за швидкістю системою автоматичного регулювання. Як керованого перетворювача вибираємо реверсивний тиристорный перетворювач. Такий електропривод забезпечує високі показники якості регулювання швидкості, високу точність і швидкодія надійність, простоту в налагодження та експлуатації. Регулювання швидкості приймається однозонным (управління зміною напруги якоря двигуна при постійному потоці порушення). Систему керування електроприводом реалізується на аналогової елементної базе.
3 ВИБІР І ПЕРЕВІРКА ЭЛЕКТРОДВИГАТЕЛЯ.
3.1 РОЗРАХУНОК НАГРУЗОЧНОЙ ДІАГРАМИ МЕХАНИЗМА.
Для попереднього вибору двигуна побудуємо навантажувальну діаграму механізму (графік статичних навантажень механізму) Розрахунок часу ділянок циклу на етапі попереднього вибору двигуна виконуємо приблизно, т.к. поки не можна визначити час разгонов і уповільнень (сумарний момент інерції приводу до вибору двигуна неизвестен).
Знижена швидкість входу різця на метал (принимается):
где.
Vпр — швидкість робочого ходу (Vп = 0,4 м/с, див. таб. 1).
Зусилля переміщення столу на холостому ходу:
где.
mс — маса столу (mс = 15 000 кг, див таб. 1);
mд — маса деталі (mд = 23 000 кг, див таб. 1);
g — прискорення вільного падіння (g = 9,81 м/с2);
? — коефіцієнт тертя столу про направляючі (? = 0,06, див таб. 1).
Зусилля переміщення столу при резании:
где.
Fz — зусилля різання (Fz = 170 000 М, див. таб. 1).
Час різання (приблизительно):
где.
Lд — довга деталі (Lд = 4 м, див. таб. 1);
Час підходу деталі до різцю (приблизительно):
где.
Lп — довга підходу деталі до різцю (Lп = 0,2 м, див. таб. 1);
Час прямого ходу після виходу різця з деталі (приблизительно):
где.
Lв — шлях після виходу різця з металу (Lв = 0,15 м, див. таб. 1);
Час повернення столу (приблизительно):
где.
Vобр — швидкість зворотного хода.
Час циклу (приблизительно):
3.2.
3.3 ПОПЕРЕДНІЙ ВИБІР ДВИГАТЕЛЯ.
При розрахунку потужності двигуна вважаємо, що номінальною швидкості двигуна відповідає швидкість зворотного ходу столу (найбільша швидкість механізму), т.к. прийнято однозонное регулювання швидкості, здійснюване вниз номінальної швидкості. Орієнтуємося вплинув на вибір двигуна серії Д, розрахованого на номінальний режим роботи S1 і має примусову вентиляцию.
Еквівалентну статична зусилля за цикл:
Розрахункова потужність двигателя:
где.
Кз — коефіцієнт запасу (приймемо Кз = 1,2);
?пN — ККД механічних передач при робочої нагрузке.
Вибираємо двигун Д816 по [2]. Номінальні дані двигуна наводяться в таб. 2.
Таблиця 2.
Дані обраного двигателя.
Параметр Позначення Значение.
Потужність номінальна PN 150 000 Вт.
Номінальне напруга якоря UяN 220 В.
Номінальний струм якоря IяN 745 А.
Номінальна частота обертання? N 480 об/мин.
Максимальний момент Мmax 8040 Нм.
Опір обмотки якоря Rя0 0,0059 Ом.
Опір обмотки додаткових полюсів Rдп 0,0032 Ом.
Температура, на яку дано опору Т 20? С.
Момент інерції якоря двигуна Jд 16,25 кг? м2.
Кількість пар полюсів рп 2.
Припустима величина чинного значення перемінної складової струму якоря віднесена до номінальному току (коефіцієнт пульсацій) kI (доп) 0,15.
Двигун цієї серії не компенсований, має примусову вентиляцію і ізоляцію класу Н.
Для подальших розрахунків буде потрібно кілька даних двигуна, які наведені у довіднику. Виконаємо розрахунок саме ті даних двигателя.
Опір ланцюга якоря двигуна, наведене до робочої температуре:
где.
kт — коефіцієнт збільшення опору при нагріванні до робочої температури (kт = 1,38 для ізоляції класу М при перерахунку від 20? С).
Номінальна ЭДС якоря:
Номінальна кутова скорость:
Конструктивна стала, помножена на номінальний магнітний поток:
Номінальний момент двигателя:
Момент холостого ходу двигателя:
Индуктивность ланцюга якоря двигателя:
где.
З — коефіцієнт (для некомпенсированного двигуна З = 0,6).
3.4 РОЗРАХУНОК НАГРУЗОЧНОЙ ДІАГРАМИ ДВИГАТЕЛЯ.
Для перевірки обраного двигуна по нагріванню виконаємо побудова спрощеної нагрузочной діаграми двигуна (не враховуючи електромагнітних перехідних процесів). Для побудови нагрузочной діаграми зробимо розрахунок передатного числа редуктора, приведення моментів статичного опору та скорочення робочих швидкостей до валу двигуна, приймемо динамічний початок і прискорення електропривода з урахуванням перевантажувальної здібності двигателя.
Передатне число редуктора:
Момент статичного опору при різанні, наведений до валу двигателя:
Момент статичного опору при переміщенні столу на холостому ходу, наведений до валу двигателя:
Знижена швидкість, наведена до валу двигателя:
Швидкість прямого ходу, наведена до валу двигателя:
Швидкість зворотного ходу, наведена до валу двигателя:
Сумарний момент інерції привода:
где.
? — коефіцієнт, враховує момент інерції полумуфт, провідною шестерні і редуктора (? приймаємо рівним 1,2).
Модуль динамічного моменту двигуна за умовою максимального використання двигуна по перевантажувальної способности:
где.
k — коефіцієнт, враховує перерегулирование моменту на уточненої нагрузочной діаграмі (побудованої з урахуванням електромагнітної інерції ланцюга якоря). Приймаємо k = 0,95.
Прискорення валу двигуна в перехідних режимах:
Прискорення столу перехідних режимах:
Розбиваємо навантажувальну діаграму на 12 інтервалів. Спочатку розраховуємо інтервали розгону і уповільнення електропривода, потім інтервали роботи із постійною скоростью.
Інтервал 1. Розгін до зниженою скорости.
Тривалість інтервалу 1:
Шлях, пройдений столом на інтервалі 1:
Момент двигуна на інтервалі 1:
Інтервал 4. Розгін від зниженою швидкості до швидкості прямого хода.
Тривалість інтервалу 4:
Шлях, пройдений столом на інтервалі 4:
Момент двигуна на інтервалі 4:
Інтервал 6. Уповільнення від швидкості прямого ходу до зниженою скорости.
Тривалість інтервалу 6:
Шлях, пройдений столом на інтервалі 6:
Момент двигуна на інтервалі 6:
Інтервал 9. Уповільнення від зниженою швидкості до остановки.
Тривалість інтервалу 9:
Шлях, пройдений столом на інтервалі 9:
Момент двигуна на інтервалі 9:
Інтервал 10. Розгін до швидкості зворотного хода.
Тривалість інтервалу 10:
Шлях, пройдений столом на інтервалі 10:
Момент двигуна на інтервалі 10:
Інтервал 12. Уповільнення від швидкості зворотного ходу до остановки.
Тривалість інтервалу 12:
Шлях, пройдений столом на інтервалі 12:
Момент двигуна на інтервалі 12:
Інтервал 2. Підхід деталі до різцю із постійною скоростью.
Шлях, пройдений столом на інтервалі 2:
Тривалість інтервалу 2:
Момент двигуна на інтервалі 2:
Інтервал 8. Відхід деталі від різця із постійною скоростью.
Шлях, пройдений столом на інтервалі 8:
Тривалість інтервалу 8:
Момент двигуна на інтервалі 8:
Інтервал 3. Різання на зниженою скорости.
Шлях, пройдений столом на інтервалі 3 (принимается):
Тривалість інтервалу 3:
Момент двигуна на інтервалі 3:
Інтервал 7. Різання на зниженою скорости.
Шлях, пройдений столом на інтервалі 7 (принимается):
Тривалість інтервалу 7:
Момент двигуна на інтервалі 7:
Інтервал 5. Різання зі швидкістю прямого хода.
Шлях, пройдений столом на інтервалі 5 (принимается):
Тривалість інтервалу 5:
Момент двигуна на інтервалі 5:
Інтервал 11. Повернення зі швидкістю зворотного хода.
Шлях, пройдений столом на інтервалі 11:
Тривалість інтервалу 11:
Момент двигуна на інтервалі 5:
Нагрузочная діаграма і тахограмма двигуна представлені малюнку 4:
3.5.
3.6 ПЕРЕВІРКА ДВИГУНА ПО НАГРЕВУ.
Для перевірки двигуна по нагріванню використовуємо метод еквівалентного моменту. Використовуючи навантажувальну діаграму знаходимо еквівалентний по нагріванню момент за цикл роботи приводу. Для нормального теплового стану двигуна необхідно, щоб еквівалентний час були максимум номінального моменту двигателя.
Еквівалентний момент за цикл работы:
Умова виконується —, отже обраний двигун підходить по нагреву.
Запас по нагреву:
4 ВИБІР ОСНОВНИХ ВУЗЛІВ СИЛОВИЙ ЧАСТИ.
4.1 ВИБІР ТИРИСТОРНОГО ПРЕОБРАЗОВАТЕЛЯ.
Номінальне выпрямленное напруга й номінальний выпрямленный струм перетворювача приймаємо з низки стандартних значень по ГОСТ 6827–76 (найближче більше проти номінальним напругою і струмом двигателя)[3].
Приймаємо UdN = 230 У; IdN = 800 А.
Вибираємо стандартний перетворювач комплектного тиристорного електропривода серії КТЭУ [4]. Вибираємо двухкомплектный реверсивний перетворювач, схема сполуки комплектів встречно-параллельная, управління комплектами роздільне, кожен комплект виконано по трехфазной бруківці схеме.
Номінальне напруга комплектного електропривода одно номінальному напрузі двигуна: Uном = 220 У. Номінальний струм комплектного електропривода вибирається по номінальному току перетворювача: Iном = 800 А.
Вибираємо тип комплектного электропривода:
КТЭУ-800/220−13 212-УХЛ4.
4.2 ВИБІР СИЛОВОГО ТРАНСФОРМАТОРА.
Силовий трансформатор призначений за погодженням напруги сети.
(Uс = 380 У) з номінальним напругою преобразователя.
Номінальне лінійне напруга вторинних обмоток (расчетное):
Номінальний лінійний струм вторинних обмоток (расчетный):
Вибираємо трансформатор типу ТСП (чи ТСЗП), трифазний, двухобмоточный, сухий з природним повітряним охолодженням, відкритого виконання [2, таб. 3.1].
Таблиця 3.
Дані обраного трансформатора.
Параметр Значение.
Тип трансформатора ТСЗП-250/0,7.
Спосіб сполуки первинної і вторинної обмоток Зірка — звезда.
Номінальна потужність SТ = 235 кВА.
Номінальне лінійне напруга первинних обмоток U1N = 380 В.
Номінальне лінійне напруга вторинних обмоток U2N = 208 В.
Номінальний лінійний струм вторинних обмоток I2N = 635 В.
Втрати КЗ РК = 3800 Вт.
Щодо напруга короткого замикання uK = 4,5%.
Розраховуємо параметри трансформатора:
Коефіцієнт трансформации:
Номінальний лінійний струм первинних обмоток:
Активне опір обмоток однієї фази трансформатора:
Активна складова напруги короткого замыкания:
Реактивна складова напруги короткого замыкания:
Індуктивне опір обмоток однієї фази трансформатора:
Индуктивность фази трансформатора:
где.
?з — кутова частота мережі ().
4.3 ВИБІР СГЛАЖИВАЮЩЕГО РЕАКТОРА.
Сглаживающий редактор входить у ланцюг выпрямленного струму з метою зменшення його перемінної складової. Пульсації выпрямленного струму би мало бути обмежені лише на рівні припустимого значення для обраного двигателя.
ЭДС перетворювача при вугіллі управління? = 0:
Мінімальна сумарна (еквівалентна) индуктивность якірній ланцюга за умовою обмеження пульсацій выпрямленного тока:
где.
kU — коефіцієнт пульсацій напруги (для трехфазной бруківці схеми приймаємо kU =0,13),.
р — пульсность перетворювача (для бруківці трехфазной схеми р = 6).
Розрахункова индуктивность сглаживающего реактора:
Оскільки розрахункова индуктивность виявилася негативною, сглаживающий реактор непотрібен. Власної індуктивності якірній ланцюга достатньо обмеження пульсацій тока.
4.4 ПРИНЦИПОВА ЕЛЕКТРИЧНА СХЕМА СИЛОВИЙ ЧАСТИ.
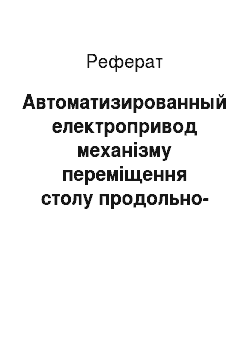
Принципова схема вибирається по [4]. Для номінального струму Iном = 800 А вибираємо схему, наведену на рис. 1.3 [4]:
На малюнку 5 приведено схема силовий частини електропривода з номінальним струмом 800, 1000 При напрузі 220, 440 У. Захисні автоматичні вимикачі QF1, QF2 встановлено послідовно з тиристорами. Для неоперативного відключення електродвигуна від тиристорного перетворювача (ТП) використовується рубильник QS. Силовий трансформатор ТМ приєднується до високовольтної мережі 6 чи 10 кВ через шафу високовольтного введення (ШВВ). При напрузі харчування 380 У ТП підключається до неї через анодные реактори LF і автоматичні вимикачі QF3, QF4.
5 МАТЕМАТИЧНА МОДЕЛЬ СИЛОВИЙ ЧАСТИНИ ЭЛЕКТРОПРИВОДА.
5.1 РОЗРАХУНОК ЕКВІВАЛЕНТНИХ ПАРАМЕТРІВ СИСТЕМЫ.
Електричну частина системи ТП-Д можна як наступній повної розрахункової схемы:
Від повної схеми можна можливість перейти до еквівалентній схемою, де всі індуктивності об'єднують у одну еквівалентну индуктивность LЭ, проте активні опору за одну еквівалентну опір RЭ.
Визначимо еквівалентні параметри ТП-Д.
Фіктивне активне опір перетворювача обумовлене комутацією тиристоров:
Еквівалентну опір якірній цепи:
Еквівалентна индуктивность якірній цепи:
Электромагнитная стала часу якірній цепи:
Коефіцієнт зователя:
где.
Uy max = 10 У — максимальне напруга управління СИФУ.
5.2 ПЕРЕХІД До СИСТЕМІ ВІДНОСНИХ ЕДИНИЦ
Для подальших розрахунків всіх параметрів і які змінюються системи уявімо в відносних одиницях. Загальна формула початку відносним одиницям має вид:
где.
y — значення величини у системі відносних единиц;
Y — значення фізичної величини в вихідної системі единиц;
Yб — базисне значення, виражене у тій системі одиниць, як і величина Y.
Приймаємо базисні величины:
Базисне напруга для силовий части:
Базисний струм для силовий части:
Базисна скорость:
Базисний момент:
Базисне напруга системі регулювання (принято):
Базисний струм системі регулювання (принято):
Базисне опір системі регулирования:
Далі використовуємо такі перемінні в відносних одиницях (о.е.):
Напруга управління перетворювача в о.е.:
ЭДС перетворювача в о.е.:
ЭДС якоря двигуна в о.е.:
Струм якоря в о.е.:
Момент статичного опору в о.е.:
Швидкість двигуна в о.е.:
Визначимо параметри об'єкта управління у о.е.
Еквівалентну опір якірній ланцюзі у о.е.:
Коефіцієнт перетворювача в о.е.:
Механічна стала времени:
Электромеханическая стала времени:
где.
? — магнітний потік в о.е. (при однозонном регулюванні швидкості? = 1).
5.3 СТРУКТУРНА СХЕМА ОБ'ЄКТИ УПРАВЛЕНИЯ.
На структурної схемою об'єкта управління (рис. 8) представлені такі звенья:
ТП — тиристорный перетворювач (безынерционное звено);
ЯЦ — якірна ланцюг двигуна (апериодическое ланка із постійною часу Тэ);
МЧ — механічна частина приводу (интегрирующее ланка із постійною часу Тj).
У об'єкті присутній внутрішня зворотний за швидкістю. На об'єкт управління впливають напруга управління ТП (котра управляє вплив) і момент опору (що вплив). Ланка множення на потік пов’язує перемінні електричної і механічної частини приводу.
6 ВИБІР ТИПУ СИСТЕМИ РЕГУЛЮВАННЯ СКОРОСТИ.
Нині в електроприводі під час створення системи автоматичного управління знайшов застосування принцип підлеглого регулювання із послідовною коррекцией.
Системи підлеглого регулювання виконуються за визначеною многоконтурной структурі (див. рис. 9).
Сутність побудови таких систем залежить від следующем:
1. об'єкт управління представляється як ланцюжка послідовно з'єднаних ланок з передатними функціями W01(p), W02(p), …, W0i-1(p), W0i (p), вихідними параметрами яких є контрольовані координати об'єкта: напруга, струм, швидкість і т.д.
2. Кількість регуляторів з передатними функціями Wр1(p), Wр2(p), …, Wрi (р) в СПР встановлюється рівним кількості регульованих величин. Усі регулятори з'єднуються послідовно, отже вихід одного є входом іншого. З іншого боку на вхід кожного регулятора подається негативна зворотний у тій перемінної, що регулюється її даним регулятором. Внаслідок цього у системі утворюються хіба що вкладені один одного контури регулювання. Отже, число контурів регулювання дорівнювала кількості регульованих координат объекта.
3. Кожен внутрішній контур управління підпорядкований наступному усе своєю чергою зовнішньому контуру, тобто. вихідний сигнал регулятора будь-якого зовнішнього контуру є що ставлять на подальше, укладеного у нього, контуру. У результаті всі внутрішні контури працюють як підлеглі завданню регулювання вихідний координати системы.
4. Обмеження будь-який координати досягається обмеженням її завдання, тобто. вихідного сигналу регулятора, зовнішнього стосовно оскільки він розглядався контуру.
5. На виході регулюючої частини системи управління встановлюється фільтр. Постійна часу Т? цього фільтра є основним параметром системи авторегулирования яких і визначає найважливіші властивості системы.
6. Синтез регуляторів СПР здійснюється методом послідовної корекції (починаючи з внутрішнього контуру і закінчуючи зовнішнім). Практично під час виборів передавальної функції регулятора Wpi (p) i-го контуру прагнуть вирішити дві основні задачи:
* забезпечити впливом регулятора компенсацію найістотніших инерционностей об'єкта, які входять у даних контур, і тим самим поліпшити швидкодія системы;
* забезпечити певний порядок астатизма даного контуру з допомогою запровадження регулятор інтегруючого звена.
Передатна функція регулятора i-го контуру матиме вид:
Налаштування системи виробляється шляхом послідовної оптимізації контурів регулювання. Кожен контур оптимізується по модульному чи симетричному оптимумам, основу яких лежить забезпечення певних показників з виконання, колебательности і точності системи автоматичного управління, тобто. отримання технічно оптимального перехідного процесса.
СПР мають такі достоинства:
1. Простота розрахунку регуляторів кожного контуру при їх настроюванні у тій чи іншому оптимуму.
2. Високі статичні і динамічні показники, забезпечувані настроюванням контурів регулювання по модульному чи симетричному оптимумам.
3. Простота обмеження регульованих координат.
4. Уніфікація устаткування, обумовлена особливостями регуляторів СПР і наявністю уніфікованих блокових систем регулювання, спеціально випущених для СПР.
5. Простота настройки.
Основна хиба — певний програш по быстродействию.
На рис. 10 представлена структурна схема двухконтурной системи підлеглого регулювання електропривода постійного тока.
У відповідність до вимог до електроприводу приймаємо двухконтурную САР швидкості з внутрішнім контуром регулювання струму якоря. Вибираємо одноразово інтегруючу САР швидкості, оскільки астатизм системи з моменту опору непотрібен і одноразово інтегруюча САР має динамічними властивостями проти дворазово інтегруючої. Контури струму якорі і швидкості налаштовані модульний оптимум. Тож у системі застосовується ПИ-регулятор струму і П-регулятор швидкості. Прискорення і це уповільнення приводу забезпечується шляхом формування лінійно мінливого сигналу завдання на швидкість задатчиком інтенсивності. Функціональна схема САР швидкості представлена на рис. 11.
8 РОЗРАХУНОК КОНТУРУ РЕГУЛЮВАННЯ СТРУМУ ЯКОРЯ І КАЙДАНИ КОМПЕНСАЦІЇ ЭДС ЯКОРЯ.
8.1 ВИБІР КОМПЕНСИРУЕМОЙ ПОСТОЯННОЙ.
Величина Т? є «базової «при розрахунку СПР, котрим характерно, що динамічні властивості системи залежить від параметрів об'єкта регулювання й лише розміром постійної часу Т? фільтра, встановленого не вдома регулюючої частини системи управління. Отже, в стандартних системах регулювання величина Т? єдиний засобом на систему управления.
З одного боку зменшення Т? призводить до збільшення швидкодії та зниження статичної і динамічної помилок за швидкістю при додатку зовнішніх збурюючих впливів, з іншого боку величина цієї постійної часу має бути досить великий, щоб забезпечити високу перешкодозахищеність системи, обмеження струму якоря на допустимому рівні, і стійкість роботи САУ з урахуванням дискретність тиристорного преобразователя.
Отже фільтр із постійною часу Т? повинен реально бути присутнім на САУ электроприводом.
У реальних САУ з підлеглим регулюванням параметрів величина Т? лежать у межах 0,004−0,01 с.
Нашій системи виберемо Т? = 0,007 с.
8.2 РОЗРАХУНОК КОНТУРУ РЕГУЛЮВАННЯ СТРУМУ ЯКОРЯ.
8.2.1 Розрахункова структурна схема контуру тока.
Контур регулювання струму якоря своїм внутрішнім контуром САУ електроприводом. Він утворюється регулятором струму, фільтром із постійною часу Т?, тиристорным перетворювачем, якірній ланцюгом і зворотної зв’язком по току через датчик струму (kдт = 1). У об'єкті управління має місце внутрішня зворотний по ЭДС якоря двигуна. Структурна схема контуру струму представлена на рис. 12.
8.2.2.
8.2.3 Передатна функція регулятора тока.
При синтезі регулятора внутрішня зворотний вп ЭДС не учитывается.
Передатна функція регулятора струму, знайдена за умовою настройки на модульний оптимум:
где.
Тi1 = Tэ = 0,07с;
При виборі даної передавальної функції регулятора струму замкнутий контур струму описуватиметься передавальної функцією фільтра Баттерворта II порядка:
За умов нерухомого якоря двигуна (коли? = 0, ея = 0). І тут реакція контуру на одиничне поетапне завдання струму представлена кривою 1 на.
рис. 13.
8.2.4.
8.2.5 Компенсація впливу ЭДС якоря двигателя.
Дія ЭДС якоря призводить до похибки регулювання струму. З’являється астатизм контуру по задающему впливу. При одиничному завданні на струм статична помилка составит:
где.
Статична помилка по току виявляється істотною, тому знехтувати впливом зворотний зв’язок по ЭДС не можна. Для компенсації впливу ЭДС якоря використовують принцип комбінованого управління. У систему управління вводиться позитивний зворотний зв’язок по ЭДС. Для зручності технічної реалізації ця зворотний подається на вхід регулятора струму, а фільтр виноситься з контуру в ланцюг завдання й зворотний зв’язок по току. Структурна схема контуру струму з що компенсує зв’язком по ЭДС представлена на рис. 14.
Передатна функція ланки компенсації ЭДС матиме вид:
где.
8.2.6.
8.2.7 Реалізація датчика ЭДС.
ЭДС якоря двигуна, на відміну струму якорі і швидкості, недоступна прямого виміру. Датчик непрямого виміру ЭДС якоря використовує сигнали датчика струму якорі і датчика напруги на якорі двигуна. Зв’язок між струмом якоря, напругою якорі і ЭДС якоря встановлює рівняння електричного стану рівноваги в якірній ланцюга. У операторном вигляді він має вид:
где.
Висловивши ЭДС, одержимо рівняння датчика. Структурна схема датчика струму приведено нижче. Для можливості практичної реалізації форсуючого ланки та питаннями захисту системи від перешкод в сигнали датчиків в каналі струму і напруження датчика ЭДС додано інерційний ланка із постійною часу Т?. Отже реальний датчик ЭДС буде инерционным.
8.3 КОНСТРУКТИВНИЙ РАСЧЕТ.
Розглянемо реалізацію керуючої частини контуру струму якоря в аналогової системі автоматичного управління електроприводом з урахуванням операційних усилителей.
Принципова схема регулятора струму й ланцюги компенсації ЭДС представлена на рис. 16.
Регулятор реалізований на підсилювачі DA1, ланка компенсації ЭДС — на підсилювачі DA2. Підсилювач DA3 призначений для підсумовування сигналів в датчику ЭДС.
Для розрахунку елементів схеми по відомим значенням параметрів в відносних одиницях використовуємо базисні величины:
Iбр = 0,5 мАЛО — базисний струм регулювання приймаємо, рекомендовані в [5].
Uбр = 10 У — базисне напруга регулирования.
Базисне опір системи регулирования:
Приймаємо величини сопротивлений.
Ємність фільтрів у ланцюзі завдання й зворотний зв’язок по току:
Ємність у ланцюзі зворотний зв’язок підсилювача DA1:
Опору у ланцюзі зворотний зв’язок підсилювача DA1:
Ємність у вхідний ланцюга підсилювача DA2.
Опір в зворотний зв’язок підсилювача DA2:
Ємність фільтра на вході DA3:
Параметри елементів на вході форсуючого ланки на вході DA3:
где.
9 РОЗРАХУНОК КОНТУРУ РЕГУЛЮВАННЯ СКОРОСТИ.
9.1 РОЗРАХУНКОВА СТРУКТУРНА СХЕМА КОНТУРУ РЕГУЛЮВАННЯ СКОРОСТИ.
Відповідно до вимог, що ставляться до електроприводу, система регулювання швидкості виконується однократної (див. п. 6). Структурна схема контуру швидкості представлена на рис. 17. Контур регулювання струму настроєна на щось модульний оптимум з наявністю компенсації за ЭДС якоря — розглядаємо, як фільтр Баттерворта II порядка.
Контур швидкості утворюється регулятором швидкості, контуром регулювання струму якоря. ланкою множення на потік, ланкою механічної частини приведення й зворотної зв’язком за швидкістю через датчик швидкості (kдс = 1). На об'єкт діє що обурює вплив — момент статичного сопротивления.
9.2 РОЗРАХУНОК РЕГУЛЯТОРА СКОРОСТИ.
У однократної САР швидкості, по умови настройки на модульний оптимум, регулятор швидкості має передатну функцію пропорційного звена:
где.
.
? = 1, т.к. Ф = ФN = const.
Передатна функція замкнутого контуру швидкості при їх настроюванні на модульний оптимум є фільтр Баттерворта III порядка:
Реакція контуру швидкості на стрибок завдання на швидкість представлена на.
рис. 18. Такий процес має місце при mc = 0 (на холостому ходу). Однократна САР має астатизмом по возмущающему впливу, тому поява навантаження призведе до статичної помилці за швидкістю. При ?* = 1 і mc = 1 (що він відповідає в абсолютних одиницях Mc =MN) статична помилка буде равна:
9.3 КОНСТРУКТИВНИЙ РАСЧЕТ.
Принимаем:
Опір у ланцюзі зворотний зв’язок DA4:
10 РОЗРАХУНОК ЗАДАТЧИКА ИНТЕНСИВНОСТИ.
10.1 СТРУКТУРНА СХЕМА ЗАДАТЧИКА ИНТЕНСИВНОСТИ.
Задатчик інтенсивності встановлюється на вході САР швидкості і призначено на формування сигналу завдання на швидкість. ЗИ обмежує темп наростання зниження завдання на швидкість і тим самим забезпечує, щоб прискорення та динамічний момент електропривода не перевищували допустимих значень. Структурна схема ЗИ представлена на рис. 20.
Принцип дії ЗИ.
По прибутті на вхід ЗИ ступенчатого впливу нелінійний елемент задатчика входить у обмеження, і вхід інтегруючого ланки надходить незмінна величина? не = Q. На виході інтегратора з’являється лінійно зростаючий сигнал.
Тепер на нелінійний елемент надходить різницю ?? = ?зи* - ?*, але його виході залишається сигнал, рівний Q, оскільки коефіцієнт посилення НЕ дуже великі, і малого неузгодженості щоб вивести його за обмеження. Зростання вихідного сигналу триває до того часу, поки? зи* = ?*, див. рис. 21.
10.2.
10.3 РОЗРАХУНОК ПАРАМЕТРІВ ЗИ.
Темп ЗИ є величину прискорення електропривода в відносних единицах:
Приймаємо постійну часу інтегратора Ті = 0,25 з. У цьому величина обмеження нелінійного елемента составит:
У абсолютних одиницях обмеження відповідає 10 В.
Сталий динамічний момент при розгоні з темпом А:
Перевіримо виконання условия:
З пункту 3:
Встановлена динамічна помилка за швидкістю при розгоні з темпом А:
10.4 КОНСТРУКТИВНИЙ РАСЧЕТ.
Принципова схема ЗИ представлена на рис. 22.
Нелінійний елемент реалізується на операційному підсилювачі DA7 через включення в зв’язок пари стабилитронов VD6 і МВ7. Інтегратор реалізується на операційному підсилювачі DA6. Підсилювач DA5 призначений для инвертирования сигнала.
Принимаем:
Коефіцієнт посилення лінійної зони нелінійного елемента приймаємо рівним 100.
Ємність в зворотний зв’язок интегратора:
11 КОМП’ЮТЕРНЕ МОДЕЛЮВАННЯ САР СКОРОСТИ.
1. Типові завдання до курсовому проекту з основ електропривода / Томашевський Н.І., Шрейнер Р. Т. та інших. — Свердловськ: СИПИ, 1989. — 48 с.
2. Довідкові дані про елементам електропривода: Методичні вказівки до курсовому проекту з дисципліни «Теорія електропривода «/ И. Я. Браславский.
3. А. М. Зюзев та інших. — Єкатеринбург: УГТУ, 1995. — 56с.
4. Розрахунок напівпровідникового перетворювача системи ТП-Д: Методичні вказівки до курсової роботу з курсу «Електронні мікропроцесорні і преосвітні устрою «/В.І. Лихошерст. Свердловськ: УПИ, 1990. — 37 с.
5. Комплектні тиристорные електроприводи: Довідник / І.Х. Євзеров, О. С. Горобець та інших.; під ред. В. М. Перельмутера. — М.: Энергоатомиздат, 1988. — 319 с.
6. Шрейнер Р. Т. Однозонные системи автоматичного управління швидкістю електроприводів: Навчально-методична розробка до курсовому проектування з дисципліни «Системи автоматичного управління электроприводами ». — Свердловськ: СИПИ, 1985. — 77 с.