Обґрунтування кроку ланцюга і діаметра ведучої зірочки
При роботі косарки сегменти сприймають дію сили різання. Сегменти мають можливість відхиляться на деякий кут від напряму вектора швидкості машини, оскільки ланцюг, на якому вони встановлені, є гнучким елементом. Величина кута відхилення залежить від сили попереднього натягу ланцюга і сили різання. Величину кута відхилення необхідно мінімізувати, оскільки це робить вплив на якість роботи косарки… Читати ще >
Обґрунтування кроку ланцюга і діаметра ведучої зірочки (реферат, курсова, диплом, контрольна)
Основні геометричні параметри елементів різального апарату, а саме: крок пальців, кут нахилу кромки леза і розміри сегмента, розміри і форма пальців, протирізальних пластин, прийняті відповідно до діючого стандарту. Інші параметри різального апарату пов’язані з кроком ланцюга.
Виходячи з необхідності мінімізувати вертикальний габарит ріжучого апарату, а також з урахуванням розрахунків на міцність, вибраний роликовий ланцюг з кроком tц = 15,875 мм по ГОСТу 10 947−64.
Щоб виключити скупчування трави на верхній поверхні різального апарату, мінімальним має бути і подовжній його габарит. Подовжній розмір різального апарату пов’язаний з діаметром веденої зірочки. У сільськогосподарських машинах рекомендується застосовувати зірочки з числом зубів не менше 16 [37]. Це значення набуте для веденої зірочки z2 = 16.
Діаметр веденої зірочки :
d2=z2tц/Р=80,9 мм.
Обґрунтування величини попереднього натягу ланцюга
При роботі косарки сегменти сприймають дію сили різання. Сегменти мають можливість відхиляться на деякий кут від напряму вектора швидкості машини, оскільки ланцюг, на якому вони встановлені, є гнучким елементом. Величина кута відхилення залежить від сили попереднього натягу ланцюга і сили різання. Величину кута відхилення необхідно мінімізувати, оскільки це робить вплив на якість роботи косарки.
Нехтуючи силами тертя, складено рівняння рівноваги плоскої системи сил відносно точки А.

;
P•a-T•b=0 (3.10).
Визначимо значення a і b із трикутника АВС.
b=АС=d sinб (3.11).
a=ВD+АС.
З трикутника ВDМ ВD=h соs б; (3.12).
a=d sin б +h соs б;
Підставивши значення a і b із рівнянь (3.11) та (3.12) в рівняння отримаємо (3.10).
Р (d sin б +h соs б) — Тd sin б=0.
після перетворення.
(3.13).
Розв’язавши рівняння (3.13) відносно a, отримаємо.
(3.14).
На основі формули (3.14) побудована сітчаста діаграма для визначення оптимальної сили натягу ланцюга. Номограма показана на рисунку 3.8.
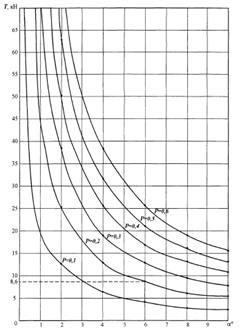
Рис. 3.8 — Номограма для визначення оптимальної сили натягу ланцюга ріжучого апарата.
Прийнявши в якості приклада значеня a = 6° і Р = 0,2 кН, з номограми виходить: Т = 8,6 кН.
У пропонованій конструкції косарки сила натягнення ланцюга має важливе значення. Надмірне натягнення знижує ресурс ланцюга, а слабке призводить до порушення технологічного процесу.
Оптимальне натягнення ланцюга встановлюється за допомогою динамометрического ключа. Свідчення динамометра М визначається по формулі.

(3.15).
де Топтимальна сила натягнення ланцюга, визначається по номограмі рис. 2.9; h — крок гвинта.