Адаптивні САК.
Теорія автоматичного керування
Системою екстремального керування називається система, в якій автоматично відшукується та підтримується режим роботи, що характеризується максимально (мінімально) можливим значенням показника якості. Теорія автоматичного управління. Конспект лекцій (частина 4) для студентів факультету комп’ютерних наук та інформаційних технологій денної та заочної форми навчання із спеціальності «Автоматизоване… Читати ще >
Адаптивні САК. Теорія автоматичного керування (реферат, курсова, диплом, контрольна)
Уявлення про адаптивні САК
Системи автоматичного керування, розроблені згідно з припущенням, що властивості об'єкта та зовнішні збурення відомі і не змінюються протягом експлуатації, забезпечують потрібні показники якості лише в тому разі, якщо відхилення параметрів об'єкта і збурень від розрахункових значень неістотні. Проте в багатьох випадках параметри об'єкта та зовнішні збурення змінюються в досить значних межах, крім того, взагалі інформація про властивості об'єкта та зовнішні збурення може бути не повною. Тому САК, які розробляються за заданими характеристиками об'єкта і збурень і мають незміну структуру параметри, у більшості випадків не забезпечують оптимальних режимів функціонування. Ще більші складності виникають під час проектування систем, що працюють при неповній інформації про властивості об'єкта та зовнішні збурення .
Вихід з цих ускладнень полягає в розробці регуляторів, властивості яких змінюються так, щоб при змінюванні параметрів об'єкта і зовнішніх дій якість системи зберігалася, тобто властивості регуляторів мають пристосовуватись (адаптуватися) до цих змінювань. Системи з такими регуляторами називаються адаптивними (самонастроювальними).
Отже, адаптивна САК — це система, яка здатна в процесі виконання основної задачі керування за рахунок змінювання параметрів виконання і структури регулятора поповнювати нестачу інформації про об'єкт керування і, діючи на його зовнішні збурення, поліпшувати якість свого функціонування. Розглянемо одномірний об'єкт, що описується рівнянням у векторно-метричній формі.
=A (t)X+B (t)U+W (t) f,
де Uкеруюча дія;
f — збурення;
А (t)-матриця системи розмірністю 1 х п;
B (t), ш (t) — матриці стовпці їх п, причому всі або окремі компоненти матриць задані не точно або змінюються протягом часу, тобто є так званими невизначеними параметрами. Причина невизначеності параметрів може бути різною і наближені відомості про математичну модель об'єкта, розкид параметрів у межах технологічних допуски та ін.
Звичайно параметри об'єкта змінюються повільніше, ніж змінні стану, тому інтервал роботи об'єкта [to, ti] можна розділити на підінтервали, протягом яких параметри об'єкта можна вважати незмінними. Тоді, позначивши a4(t) невизначений параметр, для підінтервалу дістанемо.
інтервал квазістаціонарності параметрів.
Гіпотеза квазістаціонарності передбачає, що час затухання перехідних процесів по кожній із змінних стану tіn значно менший, ніж інтервал квазістаціонарності. Згідно з цією гіпотезою, процеси в об'єкті керування поділяються на «швидкі» (змінювання змінних станів) і «повільні» (змінювання параметрів).
Для синтезу квазістаціонарних систем можна користуватися будь-якою з відомих процедур, у тому числі процедурою синтезу оптимальних регуляторів. Але, виходячи з того, що параметри об'єкта насправді змінюються і вважаються сталими тільки протягом інтервалу квазістаціонарності, задачу синтезу необхідно розв’язувати в процесі та темпі роботи об'єкта автоматично. Отже, алгоритм регулятора повинен змінюватися під час роботи система, пристосовуючись (адаптуючись, самонастроюючись) протягом часу до параметрів об'єкта, що змінюються, так, щоб якість роботи системи залишалась незмінною .
При такому підході до побудови адаптивної системи передусім необхідно розв’язати задачу ідентифікації (визначення) параметрів об'єкта керування.
Системи з ідентифікаційним алгоритмом називаються параметрично адаптивними системами.
Недоліком алгоритму ідентифікації є те, що він недостатньо пов’язаний з ціллю керування, хоч і призначений для її досягнення. Раціональним є пошук законів змінювання параметрів регулятора, виходячи безпосередньо з цілей керування. При цьому параметри регулятора повинні змінюватись залежно від значення критерію якості роботи системи. Такі алгоритми називаються прямими алгоритмами адаптивного керування. Системи, в яких використовуються ці алгоритми, називаються функціонально адаптивними системами керування.
Пристрій, що реалізує алгоритм адаптації, називається адаптером.
Особливість структури адаптивних систем полягає в тому, що порівняно із звичайними неадаптивними системами вони мають додатковий контур — контур адаптації (самонастроювання), призначений для переробки інформації про умови роботи, що змінюються, і наступної дії на регулятор основного контуру керування.
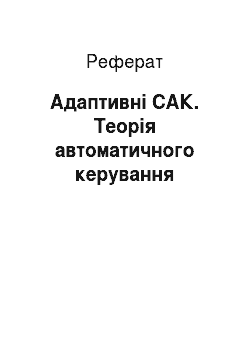
Функціональну схему адаптивної системи наведено на рисунку. Контур, що складається з керуючого пристрою і об'єкта керування, є основним контуром системи і становить звичайну неадаптивну САК. Адаптер у загальному випадку дістає інформацію про вхідну дію g, збурення f, вихідну величину х і діє на керуючий пристрій основного контуру. Отже, адаптивна САК, крім основного контуру, має контур адаптації. Для цього контуру об'єктом керування є вся основна САК.
Адаптивні системи звичайно поділяють на два класи: параметричні і непараметричні. У параметричних системах структура керуючого пристрою залишається незміною, а адаптація здійснюється за рахунок змінювання (підстроювання) значень параметрів з ціллю наближення їх до оптимальної настройки. Такі системи називаються також самонастроювальними.
У непараметричних системах адаптація здійснюється за рахунок змінювання структури (алгоритму функціонування) керуючого пристрою. Такі системи називаються також самоорганізуючими.
Першими адаптивними системами були системи екстремального керування.
Системою екстремального керування називається система, в якій автоматично відшукується та підтримується режим роботи, що характеризується максимально (мінімально) можливим значенням показника якості. Теорія автоматичного управління. Конспект лекцій (частина 4) для студентів факультету комп’ютерних наук та інформаційних технологій денної та заочної форми навчання із спеціальності «Автоматизоване управління технологічними процесами» (6.92 501).