Радиолиния передачі цифровий командної інформації з наземного пункту управління на борт ИСЗ
Для виділення сигналів посимвольной синхронізації безпосередньо використовується послідовність прийнятих інформаційних символів. На Малюнок 3 показано функціональна схема інерційної системи посимвольной синхронізації. Через війну диференціювання сигналу, утворюється послідовність імпульсів, тимчасове положення яких відповідає кордонів між сусідніми символами «1» і «0». Ця послідовність надходить… Читати ще >
Радиолиния передачі цифровий командної інформації з наземного пункту управління на борт ИСЗ (реферат, курсова, диплом, контрольна)
Московський ОРДЕНА ЛЕНІНА І ОРДЕНА ЖОВТНЕВОЇ РЕВОЛЮЦІЇ Авіаційний Інститут імені СЕРГО ОРДЖОНИКИДЗЕ.
(технічний университет).
Кафедра 402.
«радіосистеми управління і передачі информации».
Курсової проект.
на тему.
|Радиолиния передачі цифровий командної інформації | |з наземного пункту управління на борт ШСЗ | | |.
|Выполнил: |студент групи | | |04−519 | | |Гуренков Дмитро | |Перевірив: |викладач | | |Большов Про. А. |.
Москва 2004 год.
Содержание Задание 3.
Цифрова радиолиния з сигналом КИМ-ФМ 3.
Основний тракт радіолінії 4 Система фазової автоподстройки частоти (ФАП) 5 Система посимвольной синхронізації 7.
Определение параметрів імітаційної моделі 9.
Аналіз результатів розрахунку моделювання 10.
Література 10.
Задание.
Виконати системне проектування командній радіолінії (КРЛ) «Земля — ШСЗ» з урахуванням вихідних даних про очікуваних сеансах связи.
Вибрати параметри радіосигналу, спосіб кодування, структуру і параметри передавальних і прийомних трактів радіолінії, які забезпечують виконання заданих технічних умов. Поставити вимоги на проектування підсистеми символьній синхронізації і підсистеми захоплення і виділення несучою частоты.
Підтвердити прийняті рішення імітаційним моделированием.
Порівняти спроектированную радиолинию з радиолинией оптимальної для заданого сигнала.
Цифровая радиолиния з сигналом КИМ-ФМ.
У цифровий системі передачі з радіосигналом КИМ-ФМ необхідно оцінити точність передачі повідомлення й вибрати основні параметри радіолінії, що визначають точність. Відомо, що у системі безупинно послідовно передаються команди, або ведеться прийом телеметричних даних [pic]. Початок і поклала край кожної команди (слова) відзначаються символом (імпульсом). У приймальному устрої застосовується посимвольный прием.
[pic].
Малюнок 1. Функціональна схема радіолінії КИМ-ФМ.
Необхідно знати — швидкість передачі R (двійкових одиниць на секунду), енергетичний потенціал радіолінії, закон зміни несучою частоти через нестабільність передавача і рух передавального і приймаючої пунктів. Прогнозується також, що символи в КІМ сигналі можуть вважатися незалежними, а завжди апріорна можливість появи нуля і одиниці одинакова.
Функціональна схема аналізованої радіолінії представлена як Малюнок 1. Повідомлення [pic] надходить на тимчасової комутатор, де квантуется за часом, перетворюючись на сигнал АИМ. Далі в преобразователе «напруга — код» виробляється сигнал КІМ, у якому двоичной формі закодована амплітуда імпульсу АИМ і, отже, величина повідомлення. Кодове слово передається протягом часу [pic]. Сформований відеосигнал модулює несе за фазою, створюючи сигнал КИМ-ФМ.
У приймальному устрої після перетворення і через посилення відбувається синхронне детекторування (перемножування). Опорне напруга для синхронного детектора виробляє система ФАП. Продетектированный відеосигнал интегрируется.
Після інтегратора сигнал надходить по основному тракту на вирішальне пристрій. Тут у певні моменти часу [pic], відповідні кожному розряду кодового слова, оцінюється значення символу (0 чи 1). Для цього напруга сигналу [pic] порівнюється зі порогом [pic] і законодавців береться постанову по наявності символу «1», якщо [pic] про наявність «0», якщо [pic]. Для оптимальної системи КИМ-ФМ граничне напруга беруть рівним [pic][1]. Моменти [pic] визначаються тракті символьній синхронізації. Оцінки символів з вирішального устрою надходять на реєстрацію й далі на систему вторинної обробки інформації, де його випущено корекція перекручених слів, виділення повідомлення й оцінка його параметров.
Як показник точності основного тракту приймається ймовірність неправильної оцінки символу ([pic]). Ця величина, своєю чергою, є вихідної для проектування системи вторинної обробки інформації. У залежність від застосовуваних тут алгоритмів через [pic] можна отримати та інші заходи точності, як, наприклад, ймовірність помилки у кодовому слові чи среднеквадратическая помилка відновленого сообщения.
Як зовнішнього на систему розглядатимемо власний шум приймача, поставлене енергетичним потенціалом [pic].
Основной тракт радиолинии.
Аналіз основного тракту радіолінії доцільно розпочати зі з’ясування принципову можливість отримати прийнятні результати в заданих умовах. Річ у тім, що енергетичний потенціал і швидкість передачі інформації, значення які задано, вже визначають мінімально можливу ймовірність спотворення символу. Якщо ймовірність спотворення сигналу виявиться занадто великий, то ми не має сенсу розраховувати реальну радиолинию, яка, зрозуміло, буде ще хуже.
Можливість помилки в оцінці символу на сигналі КИМ-ФМ для оптимальної обробки равна.
[pic], (1) [pic] - потужність сигналу КИМ-ФМ, [pic] - тривалість одного символу, [pic] - спектральна щільність шуму. Після розрахунку помилки за такою формулою (1) може виявитися необхідним зажадати змінити вихідні умови — збільшити енергетичний потенціал або зменшити швидкість передачі й тільки після цього розпочати розрахунку реальної радиолинии.
Розглянемо проходження сигналу через основний тракт приймального устрою (Малюнок 1), вважаючи, що допоміжні системи (ФАП і тракт синхронізації) працюють ідеально. І тут сигнал детектируется в синхронному детекторі незалежно від шума.
Після проходження інтегратора сигнал спотворюється, як показано на Малюнок 2 (штрихової лінією). У цьому малюнку відзначені також моменти [pic], які взято у середині кожного разряда.
[pic].
Малюнок 2. Сигнал не вдома лінії КИМ-ФМ.
Оптимальна система припускає наявність інтегратора зі скиданням, який інтегрує напруга із виходу синхронного детектора протягом часу, відведеного передати символу. Моменти, у яких виробляється оцінка символу, слід у своїй брати наприкінці кожного розряду. Але це можна тільки у разі, як у системі є точна посимвольная синхронізація (саме точну посимвольную синхронізацію ми й використовувати). Інакше помилки синхронізації приведуть до того що, що майже половині випадків оцінка відбуватиметься над кінці даного розряду, а на початку наступного, що, своєю чергою, призведе до зростання ймовірності помилок щодо оцінки символу. Чим ближче до до середини буде взято моменти [pic], тим менше вимоги до точності посимвольной синхронизации.
Система фазової автоподстройки частоти (ФАП).
Розглянемо тепер умови, у яких забезпечується нормальна робота допоміжних трактів. Опорне напруга для синхронного детектора виробляється з допомогою системи фазової автоподстройки частоти (ФАП).
Одержання опорного напруги предсавляет собою особливу технічну завдання. З цією метою неможливо використати незалежний гетеродин в приймальному устрої, оскільки його коливання мало будуть когерентными з несучою сигналу. Причиною є втечі частоти через нестабільності генератора, долеровское усунення частоти из-зи руху пункту передачі чи приймання й т. буд. Задля більшої когерентності гетеродина в приймальнику необхідно синхронізувати прихожим сигналом.
Перший засіб створення когерентного опорного напруги — спосіб який ми й реалізовувати. Коли спектрі сигналу є компонента на несучою частоті [pic], її використовують із синхронізації гетеродина звичайно з допомогою системи ФАП або безпосередньо виділяють з допомогою вузькосмугового фільтра і після відповідної обробки (посилення, обмеження, повороту фази) беруть під ролі опорного напруги. Поворот фази, які треба зробити на опорному каналі, залежить від фази компоненти на несучою частоті, т. е. при КИМ-ФМ від параметрів сигналу [pic] і [pic] (де [pic] - коефіцієнт передачі фазової модуляції [рад/В], [pic] - «1» в середньому займають стільки на той час, скільки «0»). Приміром, якщо прийнято [pic] і, отже, гармоніка на несучою частоті визначається как.
[pic], (2) фаза опорного сигналу повинна збігатися з фазою несущей.
Частіше, проте, має місце випадок, коли спеціально роблять [pic], щоб зберегти в спектрі компоненту на несучою частоті. У цьому фаза опорного напруги повинна відрізнятися на [pic] від фази несучою сигналу. Неважко бачити, що, зменшуючи індекс фазової модуляції ([pic]) задля збереження несучою, ми цим знижуємо амплітуду полезноых компонент. Отже, вибір величини [pic] доводиться проводити з суперечливих вимог. Практично можна взяти, наприклад, [pic] рівної [pic]. У цьому потужність на несучою становить майже четверту частину всієї потужності сигнала.
Отже, частина енергії передавача витрачається до роботи каналу синхронізації. Це, природно, погіршує умови виділення корисного повідомлення проти ідеальним випадком. Інша труднощі, що з виділенням компоненти на несучою частоті з сигналу ИМ-ФМ, виникає через те, що поблизу частоти [pic] розташовуються складові переданого повідомлення, які можуть потрапити на базовий канал та зробити перешкоди в роботу синхронного детектора. Тоді шумове смуга ФАП [pic] мусить бути обрано те щоб задовольнялося условие.
[pic]. (3).
Інший засіб створення когерентного опорного напруги грунтується на виділенні потрібного коливання з сигналу після попереднього зняття модуляції. нехай у спектрі сигналу ИМ-ФМ немає несуча, т. е. [pic] і [pic]. Потрібне коливання частоти [pic] можна створити у результаті певних нелінійних перетворень сигналу в опорному каналі. Ці перетворення зводяться до последовательносму множенню і діленню частоти вхідного сигналу на два.
Технічно застосування послідовного множення і розподілу частоти виявляється незручним. Розроблено радий практично більш «зручних схем, дозволяють реалізувати хоча б принцип. Є й інші досить прості схеми. Однак про все вони мають загальна вада: де вони виключають переходу синхронного детектора у зворотну режим роботи. Справді, фаза опорного напржения, отриманого внаслідок розподілу частоти, завжди матиме невизначеність на [pic]. Практично фаза залежатиме від початкових умов на делителе і може випадково змінитися на [pic] при різного роду зовнішніх впливах, перервах у зв’язку з тощо. буд. Несподіваний перехід до зворотному режиму неприпустиме спотворенням. Тож у сигналі доводиться передбачати спеціальні контрольні посилки, які виявляють зворотний роботу. Природно, що створення таких контрольних посилок витрачається частина енергії передавача, що відповідно сказвается на виділенні корисного сообщения.
І, під час розгляду основного тракту виділення повідомлень передбачається, що фазові помилки у каналі опорного напруги досить малы.
Тепер на одна з головних параметрів — смугу захоплення [pic]. Вибір цієї величини під час проектування визначається цілою низкою чинників, багато серед яких є суперечливими. Так, очевидно, що з зменшення шумових флуктуації фази опорного гетеродина треба зменшити [pic]. Проте у своїй збільшиться стала помилка спостереження согласно.
[pic]. (4).
Якщо частота несучою сигналу заздалегідь відома з великою помилкою, то доводиться до системи ФАП додатково вводити пристрій пошуку, перестраивающее гетеродин до того часу, поки частота сигналу бракуватиме в смузі захоплення. Однак у нашому випадку вважатимемо, що несуча частота нам заздалегідь відома з малої помилкою. Час пошуку [pic] зазвичай обмежена. Тому швидкість перебудови [pic] не можна вибирати дуже малій. З іншого боку, за високої швидкості і вузької смузі захоплення можна пропустити сигнал. Ця обставина також обмежує можливість звуження смуги [pic]. Отже, виникає завдання оптимального вибору смуги захоплення за наявності обмеження. Оскільки система ФАП варта вироблення опорного напруги в синхронному детекторі, як основне критерію можна взяти максимум корисного напруги сигналу з його выходе.
Система посимвольной синхронизации.
Посимвольная синхронізація використовується при посимвольном прийомі кодових слів і відданість забезпечує поділ елементарних сигналів, відповідних різним позиціям кодового слова. Вимоги до точності посимвольной синхронізації залежить від використовуваного способу обробки елементарних інформаційних сигналів в приймальнику. Після обробітку, близька до оптимальної, а вона у нашому випадку саме така, необхідно досить точне визначення кордонів цих сигналів. Вимоги до точності синхронізації зростають з зменшенням тривалості елементарних сигналов.
[pic].
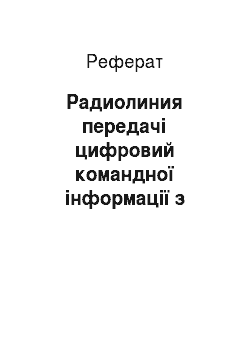
Малюнок 3. Функціональна схема інерційної системи посимвольной синхронизации.
Для виділення сигналів посимвольной синхронізації безпосередньо використовується послідовність прийнятих інформаційних символів. На Малюнок 3 показано функціональна схема інерційної системи посимвольной синхронізації. Через війну диференціювання сигналу [pic], утворюється послідовність імпульсів, тимчасове положення яких відповідає кордонів між сусідніми символами «1» і «0». Ця послідовність надходить на тимчасової дискримінатор, який відпрацьовує котра управляє напруга, пропорційне временнуму рассогласованию між вхідний і опорною послідовністю імпульсів. Остання і використовують у ролі сигналів посимвольной (тактовою) синхронізації. Опорна послідовність виробляється генератором синхронизирующих сигналів. З допомогою управляючого напруги змінюється частота прямування імпульсів опорною послідовності, цим забезпечується автоматична підстроювання генератора синхронизирующих сигналов.
Аналіз таких систем має своєю метою визначити флуктуації моментів тимчасових міток про становище, відповідних ідеальної роботі. У ролі показника точності можна взяти среднеквадратическую помилку, яка для нормальної роботи мусить бути набагато меншою тривалості одного символа.
Визначення параметрів імітаційної модели.
1) Джерело дискретних сообщений:
— дискретні незалежні повідомлення із наперед заданими імовірностями появи у джерелі V (1) = 4;
— кількість різних повідомлень JU = 32;
— можливість появи різних значень повідомлення A (1…18) = 0.055; 2) Кодуючий устройство:
— двоїчний безызбыточный код V (2) = 1;
— кількість символів NS = 5; 3) Радиоканал:
— радіоканал, використовує сигнал КИМ-ФМ і прийомний тракт з лінійним посиленням, синхронним детектором і інтегратором V (7) = 1, V (9) = 1;
— девіація фази дорівнює [pic], що він відповідає A (172) = 0.577;
— тривалість інтегрування, віднесена до тривалості символа.
A (171) = 0.8, т. е. час інтегрування одно тривалості символу; 4) Аддитивные помехи:
— широкополосная шумове перешкода. На вході радіоканалу така перешкода є «білий» шум.
— параметром моделі перешкоди є дисперсія [pic]. Таким образом,.
A (151) = 0.295; 5) Завмирання амплітуди сигналу (фединг):
— завмирання амплітуди відсутня V (6) = 1; 6) Тимчасовий становище міток системи символьній синхронизации:
— флуктуація тимчасового становища міток відсутні (символьна синхронізація ідеальна) V (3) = 1;
— номінальне становище мітки [pic], відповідно A (131) = 0.1; 7) Флуктуація фази опорного напруги синхронного детектора:
— ідеальний синхронний детектор V (4) = 0; 8) Декодирующее устройство:
— однопороговое розпізнавання двійкових символів і декодування кодових слів з допомогою метрики Хэмминга V (8) = 1;
— поріг A (191) = 0; 9) Тривалість эксперимента:
— тривалість машинного експерименту визначається обсягом досліджуваної вибірки повідомлень (кодових слів). Візьмемо кількість слів однакову кількості команд переданих за сеанс зв’язку M = 3000; 10) Додаткові параметры:
— IX = 7.
Анализ результатів розрахунку моделирования.
Розрахунки, проведені під час виборів базового варіанта радіолінії, дали такі показники достовірності прийому інформації:. ймовірність помилки символу — [pic];. ймовірність відмовитися від декодування — [pic];. ймовірність помилки кодового слова — [pic];
Через війну моделювання отримані такі оцінки достовірності:. ймовірність помилки символу — [pic];. ймовірність відмовитися від декодування — [pic];. ймовірність помилки кодового слова — [pic];
При моделюванні було взято вибірка [pic] командних слів, що відповідає тривалості сеансу 8 минут.
Зауважимо, що результати розрахунку моделювання більш як близькі по своїм значенням, у своїй показники у обох випадках задовольняють ТЗ.
Оцінимо точність статичного експерименту під час моделювання, враховуючи кількість незалежних випробувань у цьому експерименті їх 3000.. ймовірність помилки символу дорівнює [pic];. ймовірність відмовитися від декодування дорівнює [pic];. ймовірність помилки кодового слова дорівнює [pic];
Підіб'ємо підсумок. Усі утворені розбіжності у результатах розрахунку моделювання, неминучі, бо лише потребують наших із вами життя не учтешь.
1. «Теорія і проектування радіосистем», Л. У. Березін, У. А. Вейцель. -.
М.: Рад. радіо, 1977. 2. «Основи радіоуправління», під ред. У. А. Вейцеля і У. М. Типугина. -.
М.: Рад. радіо, 1973. 3. «Радіотехнічні системи передачі», П. І. Пеннин,.
Л. І. Філіппов. — М.: Радіо і зв’язок, 1984. 4. «Автоматизована модель радіолінії з цифровий передачею інформації», уч. посібник, У. А. Вейцель, З. З. Нужнов. — М.: МАІ, 1985. 5. «Методичні вказівки до курсовому проекту „Радіолінії з цифровий передачею інформації“», авт.-сост. У. А. Вейцель, А. І. Куприянов,.
М. І. Жодзишский. — М.: МАІ, 1987. ———————————- [1] див. «Теорія і проектування радіосистем», Л. У. Березін, У. А. Вейцель. — М.: Рад. радіо, 1977. стор. 202.