Расчет електричного приводу механізму підйому баштової крана
ГдеН — висота піднесення баштової крана — відстань за вертикаллю від рівня стоянки крана до грузозахватного органу, що у верхньому робочому становищі. Під рівнем стоянкиподнимается горизонтальна поверхню підстави (наприклад, поверхню головок рейок для рейкових кранів, шлях переміщення гусеничних і пневмоколёсных кранів, нижня опора самоподъёмного крана), яку спирається неповоротная частина крана… Читати ще >
Расчет електричного приводу механізму підйому баштової крана (реферат, курсова, диплом, контрольна)
1. Вибір типу электродвигателя.
2. Попередній вибір типу електродвигуна.
3. Визначення приведённого моменту електропривода.
4. Визначення приведённого моменту опору робочої.
машини.
5. Определние часу пуску і гальмування привода.
6. Визначення шляху, пройденого робочим органом за время.
пуску і торможения.
7. Визначення шляху, пройденого робочим органом з.
усталеним скоростью.
8. Визначення часу рівномірного ходу робочої машини.
9. Визначення часу паузи (з умов технологического.
процесса.
10.Определение тривалості включения.
11.Построение нагрузочной диаграммы.
12.Определение потужності двигуна з умов нагрева.
13.Проверка обраного електродвигуна на перевантажувальну.
спроможність населення і по пусковому моменту.
14. Вибір даних двигуна за каталогом. Побудова механічної характеристики двигателя.
15.Расчёт пускового реостату.
16.Выбор схеми управління та питаннями захисту двигуна.
17.Вычерчивание схеми управління і опис її работы.
(добір апаратури управління з каталогу).
Изм.
Лист.
№ Докум.
Подпись.
Дата.
Разраб.
Пигарёв.
Розрахунок електричного приводу механізму баштової крана.
Литер.
Лист.
Листов.
Провер.
Жилин.
У.
НСК.
КСМ-46.
Робітники механізми грузоподъемных кранів забезпечують переміщення вантажів у трьох взаємно перпендикулярних напрямах. Підйом вантажу здійснюється механізмом подъема.
На кранах може бути встановлене близько трьох механізмів підйому різної грузоподъемности.
Переміщення вантажу за горизонталлю на мостових і козлових кранах здійснюється з допомогою вантажний візки й самого крана, але в стрілових кранах — з допомогою механізмів повороту, зміни вильоту стріли чи вантажний візком стріли. Всіма механізмами кранів управляють вже з місця — кабіни чи посади управления.
Конструкції баштових кранів постійно вдосконалюють, що дозволяє розширити область їх застосування. Наприклад, перші крани мали вантажопідйомність 0.5…1.5 т., вантажний момент до 30 т*м., висоту підйому 20…30 м., нині працюють крани вантажністю до 50 т., вантажним моментом до 1000 т*м., висотою підйому до 150 м.
На підвищення продуктивності кранів на нових машинах збільшено швидкості робочих рухів, і навіть підвищена мобільність кранов.
1. Вибір типу электродвигателя.
На кранах застосовують переважно трифазні асинхронні двигуни перемен-ного тока.
По способу виконання обмотки ротора ці двигуни поділяють на електродвигуни з короткозамкнутым і з фазным роторами.
Двигуни з короткозамкнутым ротором застосовують у електроприводі, де немає требует;
ся регулювати частоту обертання, чи ролі другого (допоміжного) двигуна щоб одержати знижених швидкостей механізмів крана. Недоліком електродвигунів з корот;
козамкнутым ротором не є великою пускової струм, в 5…7 раз перевищує струм двигателя.
під час роботи з номінальною нагрузкой.
Двигуни з фазным ротором використовують у привід, де потрібно регулювати частоту обертання. Включення в ланцюг ротора пускорегулирующего реостату дозволяє зменшити пускової струм, збільшити пускової початок і змінити механічну характеристику двигателя.
Вона має значні переваги перед двигунами інших типів: вона дуже обмежена потужності широкому діапазоні, отримання значного діапазону частот обертання з плавним регулюванням і здійснення автоматизації виробничого процесу простими засобами; швидкість пуску і зупинки; великий термін їхньої служби; простота ремонту й експлуатації; легкість підвода энергии.
Двигуни постійного струму важче, дорожче і складніше влаштовані, ніж однакові за проектною потужністю трифазні асинхронні. Переваги двигунів постійного струму є можливість плавного і глибокого регулювання частоти обертання, тому такі двигуни застосовують у спеціальних схемах електропривода кранів для висотного строительства.
Кранові двигуни призначені до роботи, як у приміщенні, і на свіжому повітрі, тому їх виконують закритими з самовентиляцией (асинхронні двигуни) чи з незалежної вентиляцією (двигуни постійного струму) і з влагостойкой изоляцией.
Оскільки двигуни розраховані на умови роботи, їх виготовляють підвищеної міцності. Двигуни допускають короткочасні перевантаження і мають великі пускові і максимальні моменти, що підвищують номінальні моменти в 2.3…3.0 разу; мають відносно невеликі пускові струми мала час розгону; розраховані на короткочасні режими работы.
З усього вищевикладеного, для механізму підйому крана найбільше придатний трифазний асинхронний двигун змінного струму з фазным ротором у закритому виконанні і розрахований повторно-кратковременный режим роботи.
2. Попередній вибір потужності двигателя.
Попередній вибір потужності двигуна для механізму піднесення баштової крана здійснюється за формуле:
гдеQ — вагу порушуваного вантажу (кг.).
Q0 — вагу грузозахватного приспособления,.
кг;
V — швидкість піднесення вантажу ;
;
? — коефіцієнт корисної дії механізму подъёма.
кВт.
За каталогом знаходимо найближче значення потужності до полученному:
Рн = 22 кВт.
З расчётной потужності двигуна, вибираю для механізму піднесення баштової крана асинхронний двигун з фазным ротором серії МТ 51 — 8 з напругою 380 В.
3. Визначення приведённого моменту электропривода.
Махової момент системи електропривода, приведений до валу двигуна з уравнения:
де:? — коефіцієнт, враховує махові маси редуктора (перебувають розслідування щодо каталогу).
Звичайно лежать у межах від 1.1 до 1.15.
У разі приймаємо? = 1.1.
GD2дв — маховый момент попередньо обраного двигателя;
GD2дв = 4.4 .
GD2тш — маховый момент гальмівного шкива (якщо є) ;
GD2тш = 3.88 ().
GD2м — маховый момент сполучної муфты;
GD2м = 1.
GD2рм — максимальний момент робочої машини (барабана);
GD2рм =.
де m — маса барабана, m = 334 кг;
R — радіус барабана, R = 0.2 м.
отже, GD2рм = 334 .
G — сила опору поступально рушійної елемента (Н);
де Q+Q0 — вагу порушуваного вантажу з гаком (кг.);
g — прискорення вільного падіння (стала величина), g = 9.8 м/с2 ;
H.
nдвномінальна швидкість обертання двигуна (об./хв) ;
nдв= 723 об./хв.
і - передатне ставлення.
гдеnрм — швидкість обертання робочої машини (барабана).
гдеm — число полиспастов (m=2);
Dб — діаметр барабана (Dб=0.4 м).
? = 3.14.
V — швидкість поступально рушійної элемента.
об/мин;
4. Визначення наведеного моменту опору робочої машини.
Підіймаючись вантажу величина моменту опору, коли потік енергії залежить від двигуна до робочої машині, перебуває з уравнения:
гдеi — передатне ставлення (і = 25.22);
? — к.п.д. передачі (?= 0.84).
Мрм = момент опору на валу робочої машини.
де Q+Q0 — вагу вантажу з гаком (кг)(Q+Q0 = 5775 кг).
Dб — діаметр барабана (Dб = 0.4 м).
m — число полиспастов (m = 2).
? — ккд електропривода (? = 0.84).
5. Визначення часу пуску і гальмування привода.
Час пуску і гальмування двигуна визначається по формулам:
де GD2 — маховый момент системи електропривода (GD2 = 12.84);
nдв — частота обертання двигуна (nдв = 723);
Мj — динамічний момент электропривода.
Знак плюс у моментаМg береться у разі, коли двигун працює у руховому режимі, а знак мінус — при гальмовому режиме.
Знак плюс у моменту опору вибирається у разі, коли робоча машина по;
могает руху системи (при опусканні вантажу), а знак мінус, якщо робоча машина заважає руху системы.
Розмір моменту двигуна перебуває з уравнения:
Мg = ?Мн.
де? — коефіцієнт, залежить від типу двигуна й умови пуска.
Для двигуна постійного струму і асинхронних двигунів з фазным ротором.
? = 1.4? 1.6.
Для даного двигуна? = 1.6.
гдеМн — номінальний момент двигателя.
Рн — номінальна потужність двигуна (Рн = 22 кВт);
nдв — частота обертання двигуна (nдв = 723).
Мj1 = Мg — Мс = 47.47 — 32.45 = 15.02.
Мj2 = - Мg — Мс = - 47.47 — 32.45 = - 79.92.
Час пуску.
с;
Час торможения.
с.
У подальших расчётах знак мінус, стоїть у часу гальмування, не учитывается.
6. Визначення шляху, пройденого робочим органом під час пуску і.
торможения.
Шлях, пройдений робочим органом під час пуску і гальмування, обчислюється по формулам:
де tn — час пуску приводу (tn = 1.64 с);
tm — час гальмування приводу (tm = 0.31 с);
V — швидкість поступально рушійної елемента (V = 0.3 м/сек).
м;
м.
7.Определение шляху, пройденого робочим органом.
з усталеним скоростью.
Шлях, пройдений робочим органом, з усталеним швидкістю обчислюється по формуле:
гдеН — висота піднесення баштової крана — відстань за вертикаллю від рівня стоянки крана до грузозахватного органу, що у верхньому робочому становищі. Під рівнем стоянкиподнимается горизонтальна поверхню підстави (наприклад, поверхню головок рейок для рейкових кранів, шлях переміщення гусеничних і пневмоколёсных кранів, нижня опора самоподъёмного крана), яку спирається неповоротная частина крана. (Приймаємо М =16 м).
Sn — шлях, пройдений робочим органом під час пуску (Sn = 0.25 м).
Sm — шлях, пройдений робочим органом під час гальмування (Sm = 0.05 м).
Sp = H — (Sn + Sm) = 16 — (0.25 + 0.05) = 15.7 м.
8.Определение часу рівномірного ходу робочої машины.
Час рівномірного ходу робочої машини можна визначити по формуле:
де Sp — шлях, пройдений робочим органом з усталеним швидкістю (Sp = 15.7 м);
V — швидкість поступально рушійної елемента (V = 0.3).
сек.
9. Визначення часу паузи (з умов.
технологічного процесса).
З умов технологічного процесу приймаємо час паузи равным:
t0 = 210c = 3.5 мин.
що задовольняє технічним вимогам обраного двигателя.
10. Визначення тривалості включения.
Час одного включення двигуна, його праці та наступної зупинки, називається робочим циклом. Тривалість циклу звичайно понад десять хв. Промисловість випускає кранові електродвигуни, розраховані 15, 25, 40 і 60% - ную відносну тривалість включения.
Величина ПВ показує, скільки часу двигун перебуває включеною у протягом цикла:
Зазвичай кранові двигуни розраховані працювати при 25% ПВ, але і той ж двигун може працюватимете, і при 15% ПВ, і за 40% ПВ, та заодно повинна відповідно змінюватися його нагрузка.
У цьому случае.
11. Побудова нагрузочной диаграммы.
Нагрузочной діаграмою називається залежність сили струму, моменту, потужності функції времени.
Для обраного двигуна за отриманими даним будуємо навантажувальну диаграммуМ =?(t) враховуючи реальні временапротекания перехідних процесів і величини пускових і гальмівних моментів, і навіть реальні значення пауз між часами роботи двигателя.
гдеtnчас пуска;
tpчас работы;
tmчас торможения;
t0-время паузы.
Mnмомент пуска;
Mpмомент работы;
Mmмомент торможения.
12. Визначення потужності двигуна з умов нагрева.
Електричні машини нічого не винні нагріватися понад розумних меж. При пере;
греве машини ізоляція обмотувальних дротів швидко старіє, втрачає ізоляційні властивості, стає тендітній і за подальшу роботу може обвуглитися, що може спричинити до короткого замиканню і машини з строя.
По нагрузочной діаграмі визначаємо еквівалентний по нагріванню момент двигуна час його роботи без обліку часу пауз.
де Мn і Мm — моменти, що розвиваються двигуном під час пуску і торможении.
Еквівалентна мощность.
Після цього виробляється пересчёт еквівалентній потужності на найближчу, стандартну тривалість включения.
де ПВд — справжня тривалість включення двигателя.
ПВк — найближча за величиною стандартна тривалість включення стосовно дійсною ПВ.
Якщо отримана внаслідок розрахунку потужність Рк < Рн двигун, який був попередньо обраний, в умовах нагріву проходит.>
Якщо ж Рк > Рн, необхідно задаватися наступним габаритом двигуна і розрахунок виробляти вновь.
Визначаємо еквівалентний момент:
де Mn = 1.3 Mн = 1.3. 29.67 = 38.57(кг. м).
де k — поправочний коефіцієнт (k = 1.5);
(Q+Q0) — вагу вантажу з грузозахватным приспособлением;
Dб — діаметр барабана;
m — число полиспастов;
і - передатне отношение;
? — ккд привода.
Еквівалентна мощность:
Оскільки Рк = 21.6 кВт < Рн = 22 кВт то двигун за умовою нагріву проходит.>
13. Перевірка обраного електродвигуна на перевантажувальну спроможність населення і по пусковому моменту.
Узятий за каталогом двигун (МТ51−8) перевіряється на перевантажувальну здатність виходячи з неравенства:
де? — перегрузочная здатність двигуна (вибирається за каталогом),? = 3;
Мн — номінальний момент (Мн =29.67 кГ. м).
Мmaxмаксимальний момент двигуна (вибирається за каталогом), Мmax = 85 кГ.м.
Перевірка по пусковому моменту складає підставі неравенства:
де — кратність пускового моменту (береться з каталога),=2.8;
Мс — момент опору (Мс = 32,45 кГ. м).
Якщо обраний двигун не відбувається за перевантаження чи пусковому моменту, то вибирається двигун більшого габарита, який задовольняв б цим неравенствам:
3.29.67 = 58 кГ.м.
двигун проходить на перевантажувальну способность.
0.7. 2.8. 29.67 = 58 кГ. м > 32.45 кГ.м.
двигун відбувається за пусковому моменту.
14. Вибір даних двигуна по каталогу.
Виписуємо все каталожні дані двигуна МТ 51- 8.
Величина.
Обозначение.
Значение.
Тривалість включения.
Потужність на валу.
Швидкість обертання.
Лінійний струм статора.
Напруга сети.
Коефіцієнт мощности.
КПД.
Струм ротора.
Кратність максимального момента.
Напруга між кільцями ротора.
Маховый момент ротора.
ПВ.
Рн.
nдв.
I1н.
U1.
Кр
I2н.
U2.
GDдв2.
25%.
22 кВт.
723 об/мин.
56.5 А.
380 В.
0.7.
0.84.
70.5 А.
197 В.
4.4 кГ. м2.
15. Побудова природною механічної характеристики двигателя.
Механічній характеристикою двигуна називається, залежність частоти обертання n від часу М навантаження на валу.
Розрізняють природні і штучні характеристики электродвигателей.
Природною механічної характеристикою називається — залежність оборотів двигуна від часу на валу при номінальних умовах роботи двигуна щодо його параметрів (номінальні напруги, частота, опір тощо). Зміна однієї чи кількох параметрів викликає відповідну зміну механічної характеристики двигуна. Така механічна характеристика називається искусственной.
Для побудови рівняння механічної характеристики асинхронного двигуна скористаємося формулою Клоса:
де Мk — критичного моменту двигателя;
Sk — критичне ковзання двигателя;
? — перегрузочная здатність двигуна (? = 3);
Sн — номінальне ковзання двигателя.
де nн — швидкість обертання ротора;
n1 — синхронна швидкість поля статора;
де f — промислова частота струму живильної мережі, (f = 50 Гц);
Р — число пар полюсів (для двигуна МТ 51 — 8Р=4).
Номінальне ковзання двигуна МТ 51 — 8.
Критичний ковзання двигателя.
Критичний момент двигателя.
Для побудови характеристики в координатах переходять від ковзання до оборотів виходячи з уравнения.
n = n1(1 — S).
Ковзанням задаються не більше від 0 до 1.
Так дляS = 0 n = 750. (1 — 0) = 750 об/мин;
P.S = 0.1 n = 750. (1 — 0.1) = 675 об/мин;
P.S = 0.2 n = 750. (1 — 0.2) = 600 об/мин;
P.S = 0.3 n = 750. (1 — 0.3) = 525 об/мин;
P.S = 0.4 n = 750. (1 — 0.4) = 450 об/мин;
P.S = 0.5 n = 750. (1 — 0.5) = 375 об/мин;
P.S = 0.6 n = 750. (1 — 0.6) = 300 об/мин;
P.S = 0.7 n = 750. (1 — 0.7) = 225 об/мин;
P.S = 0.8 n = 750. (1 — 0.8) = 150 об/мин;
P.S = 0.9 n = 750. (1 — 0.9) = 75 об/мин;
P.S = 1 n = 750. (1 — 1) = 0 об/мин.
При тієї ж скольжениях знаходимо за такою формулою Клоса відповідні їм моменты:
P.S = 0 М = 0 кг. м.
P.S = 0.05кг. м.
P.S = 0.1кг. м.
P.S = 0.15кг. м.
P.S = 0.2кг. м.
P.S = 0.21кг. м.
P.S = 0.3 кг. м.
P.S = 0.4кг. м.
P.S = 0.5кг. м.
P.S = 0.6кг. м.
P.S = 0.7кг. м.
P.S = 0.8кг. м.
P.S = 0.9 кг. м.
P.S = 1 кг. м.
Користуючись цими значеннями переходимо побудувати естесственной механічної характеристики двигуна МТ 51 — 8(см. рис.).
16. Розрахунок пускового реостата.
При пуск асинхронні електродвигуни споживають з живильної мережі значні пускові струми. У час пуску ковзання асинхронного электродвигателяS = 100%, а номінальному режимі вбирається у 5%.
Отже, в останній момент пуску обертове магнітне полі статора удвадцятеро частіше перетинає обмотку ротора. При пуск, тривалість якого складають частки секунд, так зростає у 5 — 6 раз. Упродовж цього терміну обмотка електродвигуна не встигне перегрітися, і пускової струм йому безпечний. Проте великі поштовхи струму призводять до поштовхам напруги, що несприятливо б'є по режимі роботи інших споживачів. У зв’язку з цим вживають заходів з обмеження пускових струмів асинхронних електродвигунів. У той самий час ці двигуни, споживаючи великі пускові струми, розвивають порівняно невеличкий поводить момент. Мета застосування штучних схем пуску асинхронних двигунів — як знизити пускові струми, а й підвищити пускові моменты.
Для асинхронного двигуна з фазным ротором спочатку опір фази ротора:
де U2 — напруга між кільцями ротора, (U2 = 197 В);
Sн — номінальне ковзання (Sн =0.036);
I2н — струм ротора (I2н = 70.5 А).
Отже, опір фази ротора буде равно:
(Ом).
Потім визначаємо коефіцієнт небаланса по формуле:
де? — число щаблів пускового реостату, (? = 5).
М% - кратність максимального пускового момента (М% = 280).
Коефіцієнт небаланса равен:
Активне опір однієї фази ротора при повністю введённом реостате (R1) визначається з уравнения:
(Ом).
Опір однієї фази ротора під час роботи двигуна другого щаблі (R2) визначається з уравнения:
R2 = R1. ?
R2 = 0.575. 0.64 = 0.368(Ом).
Опір однієї фази ротора під час роботи двигуна цього разу третьої щаблі (R3);
R3 = R2. ? = R1. ?2.
R3 = 0.368. 0.64 = 0.575. 0.642 = 0.236 (Ом).
Опір однієї фази ротора під час роботи двигуна на четвертої щаблі (R4);
R4 = R3. ? = R1. ?3.
R4 = 0.236. 0.64 = 0.575. 0.643 = 0.151 (Ом).
Опір однієї фази ротора під час роботи двигуна на п’ятої щаблі (R5);
R5 = R4. ? = R1. ?4.
R5 = 0.151. 0.64 = 0.575. 0.644 = 0.096 (Ом).
Опір щаблі реостату, закорачиваемого під час переходу з рівня на щабель окреслюється різницю опорів двома суміжних ступенях:
?R1 = R1 — R2,.
?R1 = 0.575 — 0.368 = 0.207 (Oм);
?R2 = R2 — R3,.
?R2 = 0.368 — 0.236 = 0.132 (Ом);
?R3 = R3 — R4,.
?R3 = 0.236 — 0.151 = 0.085 (Ом);
?R4 = R4 — R5,.
?R4 = 0.151 — 0.096 = 0.055 (Ом).
Критичний ковзання при введённом резисторе в ланцюг ротора будет:
а) При? R1 = 0.207 (Ом).
б) При? R2 = 0.132 (Ом).
в) При? R3 = 0.085 (Ом).
р) При? R4 = 0.055 (Ом).
.
Визначаємо рівняння штучної механічної характеристики:
а) При? R1, рівному 0.207 (Ом);
б) При? R2, рівному 0.132 (Ом);
в) При? R3, рівному 0.085 (Ом);
р) При? R4 = 0.055 (Ом);
Переймаючись значеннями P. S, підраховуємо відповідні їм моменты.
Таблиця 1. Результаты розрахунку моментов.
Значен.
Цифрові показатели.
S1.
0.1.
0.2.
0.3.
0.4.
0.5.
0.6.
0.7.
0.8.
0.9.
0.959.
M1.
18.4.
35.6.
50.7.
63.2.
84.8.
87.6.
88.8.
87.1.
S2.
0.1.
0.2.
0.3.
0.4.
0.5.
0.6.
0.688.
0.7.
0.8.
0.9.
M2.
25.3.
47.7.
65.2.
77.3.
84.7.
88.2.
88.9.
85.9.
83.1.
S3.
0.1.
0.2.
0.3.
0.4.
0.5.
0.518.
0.6.
0.7.
0.8.
0.9.
M3.
33.1.
59.8.
77.2.
86.1.
88.9.
85.1.
81.2.
72.7.
S4.
0.1.
0.2.
0.3.
0.4.
0.409.
0.5.
0.6.
0.7.
0.8.
0.9.
M4.
41.1.
70.2.
84.9.
87.2.
82.8.
77.5.
72.1.
62.4.
Користуючись результатами розрахунків, будуємо штучні механічні характеристики.
двигуна МТ 51 — 8. (див. рис.).
17.Выбор схеми управління та цивільного захисту двигателя.
Електричної схемою називається чертёж, у якому показані, сполуки електричних ланцюгів. Електричні кранові схеми дають можливість простежити проходження струму різноманітні ділянкам кайдани й посадили розглянути роботу будь-якій частині электрооборудования.
У будь-якій із схем електричних сполук крана би мало бути предусмотрены:
1) захист електроустаткування від перевантаження і коротких замыканий;
2) можливість реверсу (зміни напрями обертання электродвигателя);
3) гальмування механізму при остановке;
4) автоматичне відключення електродвигуна при підході механізму до кінця пути;
5) відключення всього електроустаткування або його частини для ремонта;
6) захист від зниження чи зникнення напруження і неможливість самозапуска двигунів за відновлення напруги після випадкового його снятия.
Надійність роботи кранового електропривода значною мірою визначається контактної апаратурою, яка, як і двигун, працює у широкому діапазоні зміни навантажень і частоти включений.
Управління электроприводами баштових кранів здійснюється з допомогою контроллёров. Контроллёром називається багатопозиційний апарат, готовий до управління електричними машинами шляхом комутації резисторів і обмоток машин; він робить все перемикання у ланцюги електродвигуна, необхідних пуску, гальмування й державного регулювання його частоти вращения.
З усіх що застосовуються управління крановыми електродвигунами контроллёров (барабанних, кулачковых і магнітних) магнітні, чи контакторные, є досконалими завдяки їхнім надёжности і високої производительности.
Переваги автоматичного, магнітного контроллёра перед ручним включенням залежить від следующем:
1) менше витрачається фізичної сили, унаслідок чого знижується стомлюваність крановщика;
2) досягається захист електродвигунів від надмірних пускових і гальмівних струмів і викликаний ними искрообразования на коллекторе;
3) розміри командоконтроллёров значно менше, ніж розміри контроллёров барабанних і кулачковых, у зв’язку з ніж, більше їх з зручністю в кабіні крановщика;
4) магнітний контроллёр дозволяє справити більше кількість операцій за годину, бо немає необхідності затримувати ручку командоконтроллёра щодо переходу з одного становище інше; у своїй пуск і гальмування відбуваються у мінімально дозволене час і загальна производимостьповышается;
5) знижується витрата енергії, затрачиваемой при пуске;
6) скорочується вартість догляду та ремонту устаткування, бо тільки самий магнітний контроллёр надійний, а й знос електродвигуна меньше.
Нарешті, більшість виробництв вирішальний чинник є куди менша можливість аварійної остановкикрана і пов’язаних із нею агрегатов.
У схемах управління крановыми двигунами широко применяюттакже різноманітних реледля цілей автоматики, захисту та управления.
Реле — це апарат, наведений на дію малопотужним імпульсом і що призводить на дію рахунок енергії місцевого источникаболее потужне пристрій. Реле реагує зміну режиму роботи електричної ланцюга чи механізму (підвищення чи зниження напруги, збільшення чи зменшення струму, зміна частоти обертання тощо.) і замикає чи розмикає свої контакты.
У схемах управління крановыми механізмами робота реле пов’язані з роботою електромагнітних контакторов. Реле, посилаючи імпульси струму в тягові котушки контакторов, включають їх, виробляючи цим перемикання у силовий кайдани й посадили змінюючи режим роботи электродвигателей.
При виборі апаратури управління необхідно враховувати можливі підвищення температури довкілля проти расчётной. Для контактів апаратів можна рекомендувати збільшити номінальний струм на 20% у разі підвищення температури на кожні 100С. Проте задля контакторов і пускателей температура повітря впливає роботу як контакторов, а й котушок електромагнітів. Тому можна рекомендувати перехід на апарати тропічного виконання чи знижувати тривалість включення як і на 20% при перевищенні температури на кожні 100С.
18.Вычерчивание схеми управління електродвигуна і опис її роботи (добір апаратури управління з каталогу).
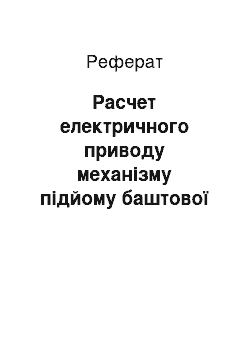
Рис. 2. Механічні характеристики електроприводів піднесення з гальмуванням противовключения.
На малюнку 1 зображено схема електропривода піднесення з панеллю управління ТСАЗ. схеми всіх панелей управління забезпечують автоматичний розгін, реверсування, гальмування і поетапне регулювання швидкості на реостатных характеристиках двигуна. Управління здійснюється від командоконтроллёра (кулачкового контроллёра малих розмірів). У схемою електропривода є такі: КН і КВ — контакторы реверсора, КЛ — лінійний контактор, КТ — контактор гальма, КУ1 — КУ4 — контакторы прискорення, КП — контактор противовключения. Подача харчування в схему здійснюється через рубильник В1, а в ланцюг управління — через рубильник В2. Захист впливає на реле РН здійснюється: максимальна (забезпечує автоматичне відключення двигуна за його перевантаження чи виникненні у його ланцюга короткого замикання) у вигляді реле РМ, кінцева (забезпечує автоматичне відключення електропривода під час переходу механізмом крана гранично допустимих положень) — кінцевими включателями ВКВ і ВКН і нульова (забезпечує контроль машиніста над роботою механізмів крана, окрім можливості самовільних пусків двигунів, отключённых внаслідок спрацьовування захисних пристроїв, чи перерви подачі електроенергії) — безпосередньо реле РН. Для захисту панелі управління від струмів, які виникають за коротких замиканнях, і великих (50% і більше) перевантажень передбачено й запобіжники П.
Перше становище піднесення (см. рис.2) служить для вибору слабини троса і піднесення малих вантажів на знижених швидкостях (характеристика 1n). З другого краю становищі (характеристика 2N) виробляється підйом важких вантажів з малої швидкістю. Наступні дві характеристики 3nи 4 «nявляются пусковими, у яких розгін виробляється під медичним наглядом реле часу РУ1 і РБ (см. рис.1), причому характеристика 4 «n є нефиксированной. На положеннях спуску виробляється регулювання швидкості двигуна в режимах: противовклю;
чения першою й другому положеннях (характеристики 1с і 2с), силового спуску чи генера -.
торного гальмування залежно ваги вантажу третьому становищі (характеристика 3с), у якому все пускові щаблі резисторів виведені. Перехід на характеристику 3с здійснюється за характеристикам 3 «сек. і 3 «» з під медичним наглядом реле часу. В усіх життєвих схемах панелей для механічного гальмування до зупинки використовують механічний гальмо ТМ.
Для спуску вантажу на характеристиках противовключения 1с і 2с оператору необхідно натиснути ВН (см. рис.1) за умови встановлення рукоятки командоконтроллёра на відповідну позицію спуску. Управління з допомогою педалі є вимушеним у зв’язку з в можливістю піднесення вантажу замість спуску на характеристиках противовключения. Електропривод перетворюється на режим противовключения як при опусканні вантажів, а й за гальмуванні з положень спуску в нульовий (при натисканні педалі першою й другому положеннях) чи з третього становища спуску в нульовий, перше чи друге становища (при не натиснутій педалі). За час витримки реле РБ часу поруч із механічним гальмуванням забезпечується електричне на характеристиці, відповідної другому становищу спуску. Крім зазначеного, реле РБ контролює також правильність складання схемы.