Контролер системної шини до К1810ВГ88
Вихідні командні сигнали і сигнали керування виробляються контролером під керуванням вхідних сигналів ІОВ, СEN і AEN, що визначають режим роботи контролера, активність командних сигналів і можливість доступу до системної шини. Контролер працює в двох режимах: із системною шиною і із шиною введення — виводу. DT/R — сигнал керування роботою шинних формувачів. DT/R=1 переключає шинні формувачі… Читати ще >
Контролер системної шини до К1810ВГ88 (реферат, курсова, диплом, контрольна)
Загальні відомості.
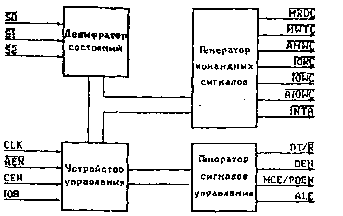
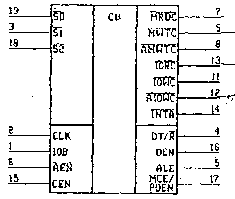
Контролер системної шини К1810ВГ88 призначений для роботи в складі мікропроцесорної системи на базі МП К1810ВМ86. У залежності від стану МП контролер керує обміном даними між локальною шиною (ЛШ) процесора і системною шиною (СШ) при наявності доступу до керування шинами МП, і також між локальною шиною і шиною введення виведення чи резидентною шиною. Контролер шини (КШ) синхронізується тактовим генератором МП і здійснює керування шинними формувачами, регістрами, фіксаторами адреси, пристроями введення — виводу і пам’яттю. Структурна схема контролера шини приведений на мал. 2.2.1, а його умовне графічне позначення — на мал. 2.2.2.
Призначення виходів.
S0, S1, S2 — входи сигналів стану МП ВМ86/ВМ87/ВМ89. Контролер шини декодує ці сигнали і формує командні сигнали і сигнали керування.
СLK — вхідні сигнали генератора тактових імпульсів ГФ84, що синхронізують роботу контролера шини.
АЕN — сигнал керування видачею командних сигналів контролера, що здійснюється через 115 не після надходження сигнала АЕN. У режимі роботи із шиною введення — виводу (IOВ = 1) сигнал АЕN не впливає на видачу командних сигналів, керуючих уведенням — виведенням.
СЕN — сигнал керування видачею командних сигналів і сигналів керування PDEN і DEN. При CEN вихідні командні сигнали знаходяться в пасивному стані (сигнал високого рівня).
IOВ — сигнал керування режимом роботи контролера. При IOВ = 1 задається режим роботи з шиною введення — виведення, а при IOВ ~ О з системною шиною.
MRDC — сигнал читання з пам’яті. Дозволяє виставити інформацію на шину даних з осередку, адреса якої встановлена на шині адреси.
МWТС — командний сигнал запису в пам’ять.
MRDC — сигнал читання з пам’яті. Дозволяє виставити інформацію на шину даних з осередку, адреса якої встановлена на шині адреси.
МWТС — командний сигнал запису в пам’ять.
AMWS — випереджальний командний сигнал запису, а пам’ять. Указує про початок машинного циклу запису і дозволяє вчасно підготуватися до запису інформації.
IORS — командний сигнал уведення з УВВ. 1'ачрешает УВВ, пірсі якого встановлений па типі адреси, виставити інформацію на типу даних.
IOWS — командний сигнал висновку в УВВ. Дозволяє УВВ, адреса якого встановлена на шипі адреси, зчитати інформацію з шини даних.
AIOWS — випереджальний командний сигнал виводу в УВВ. Вказує УВВ про початок машинного циклу виводу дозволяє йому вчасно підготуватися до виводу інформації.
DT/R — сигнал керування роботою шинних формувачів. DT/R=1 переключає шинні формувачі на передачу даних з локальної шини на шину вводу — виводи чи системну шину, DT/R переключає шинні формувачі на зчитування даних із шини введення — виводу чи системної шини на локальну.
DЕN — сигнал керування станом «включено» шинних формувачів, включених між локальною і системною чи резидентною шинами.
МСЕ/РDEN — сигнал керування виконує дві функції у залежності від режиму. У режимі роботи із шиною введення — виводу (IOВ І) використовується сигнал РDEN керування станом «включено» шинних формувачів, включених між локальною шиною і шиною введення — виводу. У режимі роботи із системною шиною (ІОВ ~ 0) використовується сигнал МСЕ керування зчитуванням номера відомчого контролера переривань, що підлягає обслуговуванню,.
ALE — сигнал керування моментом стробування (фіксації) адреси в адресному регістрі з локальної шини МП. Запис адреси здійснюємося в момент переходу сигналу ALE з високого рівня на низький.
Функціонування
Основною інформацією для формування командних сигналів і сигналів керування контролером системної шини є код стану МП, що надходить на входи S0, S1, S2. Дешифратор стану МП робить декодування коду, що надійшов, відповідно до табл. 2.2.1.
Таблиця 2.2.1.
Код состояния. | МП Состояние МП ВМ86. | Командный сигнал контроллера. | ||
S2. | S1. | SO. | ||
Подтверждение прерывания. | INТА. | |||
Ввод из УВВ. | IORC. | |||
Вывод из УВВ. | IOWC, AIOWC. | |||
Останов. | ; | |||
Выборка команды. | MRDC. | |||
Чтение из памяти. | MRDC. | |||
Запись в память. | MWTC, AMWC. | |||
Пассивное. | ; |
Вихідні командні сигнали і сигнали керування виробляються контролером під керуванням вхідних сигналів ІОВ, СEN і AEN, що визначають режим роботи контролера, активність командних сигналів і можливість доступу до системної шини. Контролер працює в двох режимах: із системною шиною і із шиною введення — виводу.
Режим роботи із шиною введення — виводу установлюється шляхом формування сигналу І0 В = 1. Цей режим використовується в тих випадках, коли контролер керує доступом до двох шин: резидентної шини введення — виводу і системною шиною. Командні сигнали IORS, IOWS, AIOWS, INTA у цьому режимі завжди дозволені, тобто їх поява не залежить від вхідного сигналу АЕN. Як тільки мікропроцесор починає виконувати команду введення — виведення, формується відповідний командний сигнал, а також сигнали РDEN і DT/R, управління моментом і напрямком передачі даних по резидентній шині введення — виводу.
Системна шина до цього випадку може працювати тільки з пам’яттю (чи з пристроями введення — виводу, відображеними на пам’ять), і МП одержує доступ до СШ тільки по сигналуAEN від арбітру шин.
Командні сигнали для роботи з не використовуються. Відповідно до виконуваного мікропроцесором командою, що вимагає звертання до пам’яті, контролер формує потрібний командний сигнал МRDC чи МWТС, АМWТС, а також сигнали керування моментами фіксації адреси АLE, передачі даних DЕN і ігноруванням передачі даних по системній шині DT/R.
Вихідний сигнал МСЕ разом із сигналом INTA використовується в циклі підтвердження переривання і системах з каскадними контролерами переривань. Сигнал МСЕ — формується в режимі роботи із системною, шиною (І0 В = 0). Коли МП відповідає на запит переривання, він виставляє код стану S2 S1 S0 = 000, по якому системний контролер формує два негативних імпульси на виході INТА. У відповідь на перший імпульс по ША і ШД не передається ніякої інформації. Перед початком другого — імпульсу сигнал МСЕ заставляє ведучий контролер переривань видати па ЛШ процесора код відомого контролера, що запросив переривання. Цей код по сигналі ALЕ записується у фіксатор адреси, По — фронті другого імпульсу INTA відомий контролер, що запросив переривання, виставляє вектор переривання на системну шину даних, відкіля він зчитується ЦП.
Вихідний сигнал ALЕ формується в кожнім машинному циклі і служить для запису поточної адреси у фіксатори адреси.
Вхідний сигнал керування СЕN діє як визначник можливості використання командних сигналів, формованих контролером системної шини. При СЕN=1 КШ функціонує нормально, а при СЕN=0 всі командні сигнали утримуються в неактивному стані. Ці особливості використовуються для поділу адресного простору й усунення адресних «конфліктів» між зовнішніми пристроями, підключеними до системної і резидентної шини.
На мал. 2.2.3 приведені тимчасові діаграми роботи КШ при активних сигналах на входах АЕN, СЕN.