Стійкість неперервних лінійних систем автоматичного керування
Крім відносно простого випадку початкового положення рівноваги, при якому об'єкт (куля) нерухомий, можливі і складніші випадки, коли незбурений стан системи є рух по деякій траєкторії (наприклад, в програмних САК). Такий стан системи називають незбуреним рухом. При дії на систему зовнішніх факторів виникають відхилення від початкового руху, і такий стан системи називають збуреним рухом. Під… Читати ще >
Стійкість неперервних лінійних систем автоматичного керування (реферат, курсова, диплом, контрольна)
Поняття стійкості САК
Під стійкістю системи в загальному випадку розуміють її властивість повертатися в початкове (або близьке до того) положення після зникнення дії факторів (збуджень), які вивели систему із стану початкової рівноваги. Стійкість системи є необхідною умовою можливості САК вирішувати поставлені перед нею завдання.
Розглянемо найпростіший приклади, що характеризують різні сторони поняття стійкості системи.
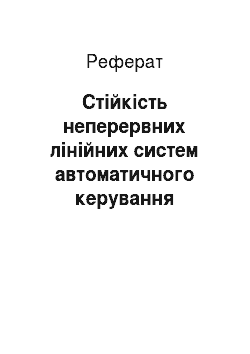
Розглянемо рух кулі по деякому криволінійному шляху рис. (а).
Якщо куля переміщуватиметься зовнішніми силами із положення початкової рівноваги О в положення І або II, то після зникнення цих сил вона повернеться в початкове положення (або близьке до нього) залежно від сил тертя. При цьому можливі коливання кулі відносно початкового положення.
У випадку, що відповідає рис.(б), куля займає нестійке положення рівноваги О. Досить невеликого зміщення кулі відносно цього положення, і вона не зможе самостійно повернутися до початкового стану.
Залежно від початкового положення рівноваги і характеру дії зовнішніх сил при відхиленнях кулі в межах відрізку шляху О — І вона буде повертатися в положення О. При виході за межі цього відрізку повернення в початкове положення стає неможливим.
Для характеристики поведінки кулі в найзагальнішому випадку нелінійних систем використовується поняття стійкості «в малому», «в великому» і «в цілому» (при окремих видах нелінійностей її називають абсолютною стійкістю).
Система є стійкою «у великому», якщо визначено межі області можливих відхилень, в яких система повертається в початкове положення, і відомо, що початкові відхилення системи не виходять за межі цієї області.
Система стійка «в малому», якщо межі області стійкості не визначені, а вказано лише факт її наявності. Система стійка «в цілому», якщо вона повертається в початкове положення рівноваги при будь-яких початкових відхиленнях (рис. а).
Система, стійка «в цілому», завжди є стійкою «у великому» і «в малому». Система, стійка «в великому», є стійкою «в малому».
В теорії автоматичного керування розрізняють поняття незбуреної рівноваги (положення О на рис. а) і збуреного стану, в яке переходить система при дії збурення і наступного його зникнення (положення II на рис. а).
Крім відносно простого випадку початкового положення рівноваги, при якому об'єкт (куля) нерухомий, можливі і складніші випадки, коли незбурений стан системи є рух по деякій траєкторії (наприклад, в програмних САК). Такий стан системи називають незбуреним рухом. При дії на систему зовнішніх факторів виникають відхилення від початкового руху, і такий стан системи називають збуреним рухом.
Незбурений рух системи називають стійким, якщо після зняття зовнішніх сил збурений рух через деякий час ввійде в задану область е.
При цьому можна записати:
.
де — відхилення координат збуреного руху.