Реалізація ДЛСК роторного вагоноперекидача ВРС-125
В системі застосовуються пристрої плавного пуску серії SMC (привід збірного конвеєра), органи управління (кнопки, джойстик) виробництва Allen — Bradley; автомати захисту, пускачі та інше силове електрообладнання українського виробництва. Нижній рівень складається з програмованого контролера PLC-5/40E з шасі розширення, і пов’язаних з ним по мережі Remote I/O периферійних пристроїв. Збір… Читати ще >
Реалізація ДЛСК роторного вагоноперекидача ВРС-125 (реферат, курсова, диплом, контрольна)
Система керування комплексом вагоноперекидача призначена для управління технологічним процесом кантування залізничних напіввагонів з сипучими матеріалами і подальшого надходження матеріалів на поточно-транспортні системи. Система також забезпечує діагностику стану електричної частини комплексу для обслуговуючого електротехнічного персоналу.
Система керування комплексом являє собою дворівневу структуру.

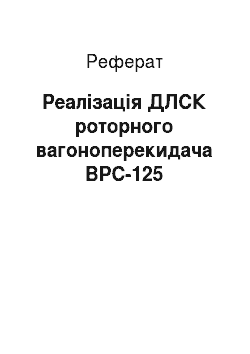
Рисунок 4.4 — Схеми реалізації синтезованого вузла на реле (а) і на логічному елементі (б).
Нижній рівень складається з програмованого контролера PLC-5/40E з шасі розширення, і пов’язаних з ним по мережі Remote I/O периферійних пристроїв. Збір інформації для виконання розрахунків здійснюється відповідними вхідними модулями.
Значення змінних в базі даних реального часу контролера оновлюються внаслідок циклічного опитування вхідних модулів і виконання логічних і математичних операцій. Усі величини зберігаються в певній безперервній області пам’яті контролера в форматі цілих чисел і чисел з плаваючою комою.
Результати розрахунків зберігаються в пам’яті контролера і доступні для читання, з метою їх подальшого відображення оператору в режимі реального часу.
Програмований термінал PanelView 1200 знаходиться на операторському посту вагоноперекидача і використовується для управління технологічним циклом комплексу та відображення стану механізмів .
Дисплей текстових повідомлень DL40, що знаходиться в приміщенні оператора керування комплексу, використовується для видачі діагностичних повідомлень електротехнічному персоналу .
Стандартні частотні приводу серії 1336, робоче місце, розташовані в операторській комплексу, забезпечують регулювання швидкості, плавний розгін і гальмування двигунів приводу ротора вагоноперекидача і приводу пластинчастих живильників.
В системі застосовуються пристрої плавного пуску серії SMC (привід збірного конвеєра), органи управління (кнопки, джойстик) виробництва Allen — Bradley; автомати захисту, пускачі та інше силове електрообладнання українського виробництва.
Верхній рівень системи представлений промисловими робочими станціями (PC в промисловому виконання) типу T71, пов’язаними з контролером з промислової мережі DH + .
Система керує :
- — вагоноштовхачем, призначеним для надходження вагонів до ротору вагоноперекидача;
- — ротором вагоноперекидача, призначеним для перекидання вагонів;
- — живильниками, призначеними для регулювання потоку матеріалів.
В системі контролюються наступні параметри:
- — кут повороту ротора, з використанням енкодера абсолютного коду (метод не вимагає наявності датчика нульового положення ротора і володіє заданою точністю);
- — швидкість обертання і навантаження двигунів, керованих приводами робоче місце (за поточним значенням вихідної частоти перетворювача і струмом статора);
- — параметри вхідних і вихідних ланцюгів перетворювачів робоче місце;
- — сигнали технологічних захистів і блокувань комплексу .
Функції управління та регулювання:
- — управління циклом перекидання вагона з формуванням складної циклограми на базі зворотного зв’язку по куту повороту ротора вагоноперекидача;
- — точне управління процесом видачі матеріалу з бункерів вагоноперекидача;
- — управління пуском і зупинкою комплексу видачі матеріалу (живильники і збірний конвеєр);
- — забезпечення технологічних блокувань і захистів;
- — формування статусних сигналів, попереджувальної і аварійної інформації для відображення на робочій станції оператора;
- — діагностика стану електричної частини комплексу на основі аналізу зібраних даних з видачею повідомлень на всі засоби візуалізації.
Функції системи відображення:
- — відображення стану механізмів та електрообладнання комплексу.
- — розшифровка і відображення даних діагностики комплексу.
- — ведення протоколу подій в системі управління та електричної частини комплексу.
Впровадження системи дозволило: збільшити продуктивність вагоноперекидача на 20%, зменшити кількість простоїв за рахунок впровадження системи діагностики, максимально виключити виникнення механічних ударних навантажень за рахунок використання частотних приводів — як результат заощадження рухомого складу та збільшення терміну служби механічного обладнання.