Розробка, дослідження системи керування на основі нейронної мережі
Електропередача дизель-потягу має автономну систему автоматичного керування, яка здійснює спільну роботу з дизелем та забезпечує керування тяговими асинхронними двигунами для реалізації тягових характеристик у всьому діапазоні швидкостей та навантажень. У електропередачі, що досліджується, використовується САК, яка забезпечує формування амплітудного значення напруги живлення та частоти тягових… Читати ще >
Розробка, дослідження системи керування на основі нейронної мережі (реферат, курсова, диплом, контрольна)
Міністерство освіти і науки України НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ
«ХАРКІВСЬКИЙ ПОЛІТЕХНІЧНИЙ ІНСТИТУТ»
Факультет XXX Кафедра «Обчислювальна техніка та програмування»
Спеціальність 8.91 502 «Системне програмування»
ЗАТВЕРДЖУЮ Завідувач кафедри ОТП
___________/Xxxxx Ф.А./
«_____» ____________2009р.
ДИПЛОМНА РОБОТА
освітньо-кваліфікаційного рівня магістр
Тема роботи «Розробка, дослідження системи керування на основі нейронної мережі»
затверджена наказом по НТУ «ХПІ» від «21 «жовтня 2009 г. № 2725-III
Шифр роботи XXX23.2725-ІІІ.
Виконавець Керівник Харків 2009
РЕФЕРАТ Звіт з дипломної роботи: 141с., 45 рис., 19 табл., 61 джерело.
Об'єкт дослідження — система керування на основі нейронної мережі.
Мета роботи — розробка та моделювання роботи системи керування на основі нейронної мережі, що відповідає сучасним вимогам до систем керування нелінійними об'єктами.
Система керування є важливою частиною електроприводу асинхронного тягового двигуна дизель-потягу. Запропонована структура системи керування на основі нейронної мережі дозволяє вирішити ряд задач оптимізації функціонування електроприводу, які складно вирішити за допомогою застосування інших систем керування.
У роботі проведене моделювання досліджуваних об'єктів засобами пакету Matlab, приведені результати дозволяють оцінити як основні параметри та характеристики системи керування, так і роботу даного об'єкту в цілому, зробити висновки про доцільність використання запропонованої архітектури.
У даному напрямку потребуються подальші дослідження з метою оптимізації функціонування.
Ключові слова: тяговий асинхронний двигун, система керування, система автоматичного регулювання, регулятор, модель, нейрорегулятор, перерегулювання, моделювання.
ПЕРЕЛІК ПОЗНАЧЕНЬ ТА СКОРОЧЕНЬ
П — регулятор — пропорційний регулятор ПІрегулятор — пропорційно-інтегральний регулятор ПІД-регулятор — пропорційно-інтегрально-диференційний регулятор САК — система автоматичного керування САР — система автоматичного регулювання СГ — синхронний генератор СК — система керування ТАД — тяговий асинхронний двигун
НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ «ХПІ»
Факультет XXX Кафедра «Обчислювальна техніка та програмування»
Спеціальність 8.91 502 «Системне програмування»
ЗАТВЕРДЖУЮ Завідувач кафедри ОТП
___________/Xxxxx Ф.А./
«_____» ____________2009р.
ЗАВДАННЯ
на виконання дипломної роботи
освітньо-кваліфікаційного рівня магістр
студентці
1 Тема роботи «Розробка, дослідження системи керування на основі нейронної мережі»
2 Зміст завдання Аналіз методів та критеріїв якості; розробка моделей об'єкта керування в середовищі Matlab; розробка системи керування електроприводу з використанням методів нечіткої логіки та нейроконтролерів; розробка регуляторів системи керування з використанням нейронних мереж. Дослідження систем керування.
3 Вихідні дані для виконання роботи Структурна схема електропередачі дизель-потяга; математичні моделі електроприводу та системи регулювання; параметри регуляторів системи керування; пакет моделювання «Matlab»; _величина перерегулювання не більше 25%, час перерегулювання — не більше 20с; число перерегулювань — 4.
4 Скласти звіт і виконати необхідні документи (конструкторські, технологічні, програмні, плакати) відповідно до плану виконання дипломної роботи.
План виконання дипломної роботи
Етап. Найменування | Термін виконання | Прізвище консультанта | |
Огляд джерел | 14−28.02.09 | М.Й.Xxxxx | |
Аналіз методів розробки систем | |||
керування електроприводом дизель; | |||
потягу | 1−5.03.09 | М.Й.Xxxxx | |
Розробка моделі системи керування | |||
електропередачі дизель-потягу | 6−15.03.09 | М.Й.Xxxxx | |
Розробка системи керування за | |||
допомогою методів нечіткої логіки та | |||
нейронних мереж для оптимізації | |||
динамічних процесів електропривода | 15−25.03.09 | М.Й.Xxxxx | |
Дослідження систем керування | |||
дизель-потяга | 25.03−5.04.09 | М.Й.Xxxxx | |
Економічна оцінка й обґрунтування | 5−9.04.09 | І.М.Xxxxx | |
Охорона праці та навколишнього | |||
середовища | 9−12.04.09 | xxx | |
Цивільна оборона | 13.04.09 | Рxxxxx | |
Оформлення документів дипломної | |||
роботи | 14−22.04.09 | М.Й.Xxxxx | |
Оформлення звіту | 14−19.04.09 | М.Й.Xxxxx | |
Оформлення плакатів | 19−22.04.09 | М.Й.Xxxxx | |
Оформлення науково-дослідної | |||
роботи магістра | 22−24.04.09 | О.Ф.Даниленко | |
Керівник роботи ________________ М.Й.Xxxxx
Студент-дипломник _________________ Д.О.Xxxxx
«___» ______________ 2009 р.
Найменування виробу, об'єкту або теми | Найменування документу | Формат | Кільк. арк. | Приміт; ка | ||||||
Документи загальні | ||||||||||
Завдання | А4 | |||||||||
Звіт | А4 | |||||||||
Плакати | ||||||||||
Структурна схема системи | ||||||||||
управління електропередачі | ||||||||||
дизель-потягу. Математична | ||||||||||
модель регулятора збудження. | схема | А1 | ||||||||
Структурна схема моделі | ||||||||||
регулятора вихідної напруги. | ||||||||||
Результати моделювання | схема | А1 | ||||||||
Вибір функцій приналежності | ||||||||||
для нечітких змінних. | схема | А1 | ||||||||
Результати роботи нечіткого | ||||||||||
нейрорегулятора із різними | ||||||||||
функціями приналежності. | схема | А1 | ||||||||
Структурна схема моделі із | ||||||||||
системою керування з | ||||||||||
використанням нейронних | ||||||||||
мереж. | схема | А1 | ||||||||
Структурні схеми для | ||||||||||
визначення вагових коефіцієнтів | ||||||||||
нейрорегулятора. | схема | А1 | ||||||||
Генетичний алгоритм (ГА) | схема | А1 | ||||||||
Результати моделювання роботи | ||||||||||
системи керування з | ||||||||||
використанням нейронних | ||||||||||
мереж. | схема | А1 | ||||||||
XXXxxxxx. 3 078−002ВД | ||||||||||
Прізвище | Підп | Дата | ||||||||
Розроб. | Xxxxx | «Розробка, дослідження системи керування на основі нейронної мережі» Відомість документів | Літ. | Арк. | Аркушів | |||||
Перев. | Xxxxx | |||||||||
НТУ «ХПІ» Кафедра ОТП | ||||||||||
Н.контр | Xxxxx | |||||||||
Затв. | Xxxxx | |||||||||
АНОТАЦІЯ
У роботі розглянуто питання побудови систем керування електроприводом дизель-потягу, проведений огляд літератури на задану тематику та аналіз існуючих підходів до розв’язання найпоширеніших задач у даній галузі. Розглянуті як стандартні системи, так і альтернативні варіанти з використанням новітніх технологій, таких як нечітка логіка та нейронні мережі. Побудовані математичні моделі та структурні схеми досліджуваних об'єктів, проведене моделювання їхнього функціонування, проаналізовані отримані характеристики та оцінена робота об'єктів в цілому. Дослідження і моделювання проведене засобами пакету Matlab.
АННОТАЦИЯ
В работе рассмотрены вопросы построения систем управления электроприводом дизель-поезда, проведен обзор литературы на заданную тематику и анализ существующих подходов к решению самых распространенных задач данной отрасли. Рассмотрены как стандартные системы, так и альтернативные варианты с использованием новейших технологий, таких как нечеткая логика и нейронные сети. Построены математические модели и структурные схемы исследуемых объектов, проведено моделирование их функционирования, проанализированы полученные характеристики и оценена работа объектов в целом. Исследование и моделирование проведено средствами пакета Matlab.
ANNOTATION
In this work the questions of building management systems of diesel-train drive are considered, review of literature to givenned themes and analysis existing approaches to decision of most wide-spread problems given to branches are organized. They are considered both standards systems, and alternative variants with use the most latest technologies, such as illegible logic and neuronetworks. They are built mathematical models and structured schemes of under investigation objects, modeling of their operation is organized, got features are analysed and working the objects as a whole is evaluated. The study and modeling is organized the facilities of package Matlab.
ЗМІСТ
Перелік позначень і скорочень Вступ
1. Аналіз методів розробки систем керування електроприводом дизель-потягу
1.1 Дизель-потяг з тяговим електроприводом змінного струму як об'єкт керування.
1.2 Аналіз методів та критеріїв якості, що використовуються для розробки систем керування об'єктами залізничного транспорту
2. Розробка моделі системи керування електропередачі дизель-потягу
2.1 Моделювання тягових двигунів дизель-потягу
2.2 Моделювання пристроїв САК об'єкта керування.
2.3 Розробка моделі блоку «синхронний генератор-випрямлювач» електропередачі дизель-потягу з використанням нейронних мереж
3. Розробка системи керування за допомогою методів нечіткої логіки та нейронних мереж для оптимізації динамічних процесів електропривода
3.1 Розробка системи керування електроприводом змінного струму з використанням методів нечіткої логіки та нейроконтролерів
3.2 Вибір функцій приналежності нечітких змінних при розробці нечіткого регулятора на основі нейроконтролера в системі керування електроприводом змінного струму
3.3 Розробка регуляторів системи керування електропередачі дизель-потяга з використанням нейронних мереж
3.4 Розробка системи керування дизель-потяга на основі нейромережевих технологій
4. Дослідження систем керування дизель-потяга
4.1 Дослідження регуляторів системи керування, розроблених на основі використання принципу регулювання за помилкою та ПІД закону керування
4.2 Дослідження регуляторів системи керування, розроблених на основі використання методів нечіткої логіки і нейромережевих технологій
5. Економічна оцінка й обґрунтування
5.1. Опис розробленого продукту
5.2 Оцінка ринку збуту
5.3 Конкуренція
5.4 Стратегія маркетингу
5.5 Оцінка ризику та страхування
5.6 Фінансовий план
6. Охорона праці та навколишнього середовища
6.1 Загальні питання
6.1.1 Загальні питання охорони праці
6.1.2 Загальна характеристика виробничого приміщення
6.1.3 Загальна характеристика трудового процесу
6.1.4 Загальна характеристика використовуваного виробничого електроустаткування
6.1.5 Аналіз небезпечних і шкідливих факторів
6.2 Виробнича санітарія
6.2.1 Параметри мікроклімату
6.2.2 Освітлення
6.2.2.1 Природне освітлення
6.2.2.2 Штучне освітлення
6.2.3 Випромінювання від екрана
6.3 Техніка безпеки
6.3.1 Електробезпека
6.3.1.1 Конструктивні міри електробезпеки
6.3.1.2 Схемно-конструктивні міри електробезпеки
6.3.1.3 Схема занулення та призначення елементів занулення
6.3.1.4. Експлуатаційні міри електробезпеки
6.3.2 Ергономічні вимоги до робочого місця
6.4 Пожежна безпека
6.5 Охорона навколишнього середовища
7. Цивільна оборона Висновки Перелік використовуваної літератури
ВСТУП
Одним зі стратегічних напрямків державної політики України в області розвитку сучасних видів транспорту є наступне:
— забезпечення задоволення потреб населення України у міських перевезеннях, у перевезеннях на дальні відстані та приміському сполученні;
— залучення до виготовлення сучасних видів рухомого складу вітчизняних виробників, у тому числі науково-технічного та виробничого потенціалу нашої країни;
— створення конкурентно-спроможного рухомого складу, що забезпечить зменшення імпортної залежності України від поставок рухомого складу з країн СНД та Західної Європи. На це вказують ряд Постанов Кабінету міністрів України, розроблено ряд Державних програм, проведена ланка нарад та постанов на рівні керівників підприємств, що займаються створенням сучасних видів рухомого складу. Зокрема, Державною програмою «Розвиток рельсового рухомого складу соціального призначення для залізничного транспорту та міського господарства», що введена у дію Постановою Кабінету Міністрів України № 769 від 2 червня 1998р., передбачено на основі використання потужного науково-технічного та виробничого потенціалу України виготовлення сучасних конкурентно-спроможних магістральних вантажних та пасажирських локомотивів, дизельта електропотягів.
Створення сучасного конкурентно-спроможного рухомого складу немислиме без створення електропередачі з тяговими електроприводами змінного струму та систем керування, що забезпечують функціонування тягових одиниць рухомого складу та його складових компонент оптимальним чином. Електрична передача є однією з важливіших частин дизель-потягу, від подальшого вдосконалення якої в багатьом залежить економічність його функціонування. Застосування безколекторних машин (у даному випадку трифазних асинхронних двигунів) пов’язані в першу чергу з підвищенням потужності тягового рухомого складу. З ростом потужності колекторних електродвигунів та генераторів при їхніх обмежених габаритах знижується надійність роботи колекторно-щіточного вузла, підвищуються експлуатаційні витрати, збільшується трудомісткість роботи по їхньому ремонту та обслуговуванню. Порівняльних аналіз електропередач для тягових одиниць рухомого складу показав, що при однаковій потужності тягового агрегату, частоті крутіння ротора двигуна та ряді інших параметрів, електрична передача з тяговими асинхронними двигунами має кращі техніко-економічно показники порівняно з електропередачею з двигунами постійного струму. Визначальну роль у творенні електропередач з електроприводом змінного струму належить системам керування та в тому числі синтезу законів керування з використанням сучасних методів та засобів, до яких відносяться методи оптимізації, синтезу та дослідження складних технічних систем, до яких можна віднести також енергетичну систему даних об'єктів.
Для рішення подібного роду задач зазвичай використовується математичне моделювання, сучасні методи теорії автоматичного керування та оптимізації, прогресивні інформаційні технології, технічні засоби реалізації на базі мікропроцесорної техніки компонент систем автоматичного регулювання.
Проблемам математичного моделювання та оптимізації за допомогою засобів обчислювальної техніки об'єктів рухомого складу, зокрема дизель-потягів, присвячено значне число публікації як у країнах дальнього зарубіжжя, так і в СНД та Україні. Але ряд питань, що стосуються синтезу систем керування для складних об'єктів, до яких відноситься електропривод дизель-потягу з асинхронними тяговими двигунами, потребує подальної розробки та досліджень. Особливо це стосується питань, що пов’язані з розробкою раціональних математичних моделей та методів оптимізації, орієнтованих на застосування засобів обчислювальної техніки та прикладного програмного забезпечення. До того ж, наряду з традиційними методами моделювання та оптимізації, які не завжди володіють необхідною гнучкістю при рішенні конкретних практичних задач з їхніми різноманітними обмеженнями, доцільно використовувати нові перспективні методи та технології на основі штучних нейронних мереж.
Метою роботи магістра є розробка нелінійних математичних моделей систем електропередачі дизель-потягу з асинхронними тяговими двигунами, засобів їхньої реалізації з використанням сучасних засобів обчислювальної техніки та прикладного програмного забезпечення, уточнення структури та параметрів САР окремих енергетичних систем об'єкта керування згідно заданого критерію якості з використанням сучасних технологій на основі методів нечіткої логіки та нейромереж, дослідження об'єкта керування.
1. АНАЛІЗ МЕТОДІВ РОЗРОБКИ СИСТЕМ КЕРУВАННЯ ЕЛЕКТРОПРИВОДОМ ДИЗЕЛЬ-ПОТЯГУ
1.1 Дизель-потяг з тяговим електроприводом змінного струму як об'єкт керування
У нашому випадку об'єктом керування є дизель-потяг з тяговим асинхронним електроприводом. Згідно [1], асинхронний тяговий електропривод локомотива є складною динамічною системою. Первинним джерелом живлення слугує дизель-генераторна установка. Далі у схему входять: випрямлювач (В); проміжна ланка постійного струму (ПЛПС); автономний інвертор напруги (АІН); тягові асинхронні двигуни (ТАД), крутячі моменти яких передаються механічній передачі(МП) та навантаженню (Н) (локомотиву та потягу) через контакт колесо-рельс; сигнали керування для генератору та інвертору формуються під контролем мікропроцесорної системи керування (СК), що обробляє сигнали з датчиків.
Енергетична система дизель-потяга може біти віднесена до класу багатозв’язкових нелінійних об’ктів керування. Для таких об'єктів керування відсутні єдині підходи синтезу регуляторів, що забезпечують необхідні показники якості підтримання вихідних змінних у широкому діапазоні зміни обурюючих впливів та умов експлуатації.
Визначним фактором при керуванні технологічними процесами в об'єктах з асинхронними електроприводами є регулювання швидкості їхніх двигунів. З позиції теорії електричних машин та електропривода основними та найбільш економічним засобом регулювання швидкості асинхронного двигуна є частотне керування. Можливість керування швидкістю локомотива шляхом зміни частоти крутіння короткозамкнених асинхронних двигунів була доведена одразу після їхнього винаходження [2,8]. Реалізувати цю можливість вдалося лише з появою силових напівпровідникових пристроїв — спочатку тиристорів, а пізніше — транзисторів IGBT [3,11], що складають основу перетворювачів частоти. Перетворювачі частоти з мікропроцесорною системою керування мають велику кількість функцій, що вільно програмуються та автоматично виконуються. Для даного об'єкта особливий інтерес представляють та можуть бути використані:
— частотні пуск та останов двигуна з оптимальним за часом розгоном та гальмуванням;
— повне керування моментом у всьому діапазоні частот;
— векторне керування двигуном (при розімкнутій системі керування);
— ПІД-регулювання керованого технологічного параметру (при замкненій системі з датчиком цього параметру).
Дійсного часу у всьому світі в асинхронному електроприводі широко реалізується частотний спосіб керування, який сьогодні розглядається не лише з точки зору економії вжитої енергії, але й з точки зору вдосконалення систем керування.
Таким чином, питанням автоматизації процесів керування в об'єктах залізничного транспорту, зокрема за допомогою асинхронних електроприводів та їхніх систем керування, приділяється значна увага як в Україні, так і в країнах ближнього та дальнього зарубіжжя. При цьому розглядаються питання дослідження різноманітних засобів покращення якості технологічного процесу шляхом вдосконалення самих пристроїв керування, а також допоміжних пристроїв (вимірювальних датчиків, перетворювачів сигналів та ін.), створення систем керування, що забезпечують функціонування об'єкта згідно заданому критерію якості, регулювання швидкості об'єкта шляхом зміни частоти та діючої напруги живлення тягових асинхронних двигунів з використанням як відомих законів керування, так і синтезованих на основі сучасної теорії автоматичного керування, реалізації пристроїв керування з використанням засобів мікропроцесорної техніки.
1.2. Аналіз методів та критеріїв якості, що використовуються для розробки систем керування об'єктами залізничного транспорту.
При розробці систем керування можна виділити два етапи. Перший — пов’язаний з вибором або синтезом структури системи керування, виходячи з можливостей отримання достовірної інформації про використовувані вихідні величини, що поступають з вимірювальних датчиків, збурюючих впливів та характеристик керуючих дій на об'єкт керування. Другий етап пов’язаний з визначенням параметрів елементів системи керування.
Структурний синтез САК базується, як правило, на відомих аналогах, а також на теоретичних розробках І.О. Вишнеградського, А. Стодоли, Д. К. Максвелла, О. М. Ляпунова, Л.С. Понтрягіна, О.М. Лєтова, А.І. Лур'є, Р. Бєллмана, Р. Е. Калмана, М. А. Айзермана, О. А. Фельдбаума, О. О. Красовського, М. М. Красовського та інших, хто заклали основи теорії автоматичного регулювання та сучасної теорії автоматичного керування та обґрунтували основні принципи побудови систем регулювання [4−6].
Таким чином, проблеми, які з’являються у конструктора при розробці визначеної системи керування (СК) — це проблема вибору методу синтезу, для визначення структури СК та критерію, згідно якого буде оцінюватися якість процесів, що протікають в об'єкті керування.
Оцінювання якості системи можна здійснити, використовуючи загальні фундаментальні теоретичні положення або поодинокі критерії, що характерні для даного об'єкта.
Методи аналізу якості перехідних процесів згідно [4, 6, 7] можна розділити на дві основні групи: перша — прямі методи оцінювання якості по кривій перехідного процесу; друга — опосередковані методи. Прямі методи потребують рішення системи диференційних рівнянь, опосередковані - не потребують.
Основними показниками якості процесу керування, що застосовуються в інженерних розрахунках, є: час регулювання, перерегулювання та коливальність перехідного процесу. При застосуванні кореневих методів — показниками якості є ступінь стійкості та ступінь хиткості системи [4,6,7].
Практичний інтерес при синтезі систем керування представляють інтегральні оцінки якості перехідного процесу [6,7]. Вони мають метою надати загальну оцінку швидкості затухання та величини відхилення величини, що регулюється, у сукупності, без визначення того та іншого окремо. Метод інтегральних оцінок дозволяє отримати в результаті розрахунку окремих інтегралів від деякої функції керованої змінної сумарну помилку за час перехідного процесу. Недоліком інтегральної оцінки є те, що вона годиться лише для монотонних процесів, коли не змінюється знак змінної, що досліджується. Тому більш доцільно використовувати квадратичну інтегральну оцінку. Загальним недоліком інтегральних оцінювань є те, що тут нічим не обмежується Форма кривої перехідного процесу, оскільки різні по формі перехідні процеси можуть мати одне й те саме чисельне значення інтегрального критерію якості.
З урахуванням конструктивного виконання силової частини елементів системи керування електропередачі, зокрема тиристорного перетворювача частоти, елементи якого розраховані на визначену величину комутуючого струму, з розглянутих методів оцінки якості, з метою проведення параметричного синтезу СК електропередачі дизель-потягу, найбільш доцільно використовувати показники якості процесу керування: час регулювання, перерегулювання та коливальність перехідного процесу.
У дійсний час існує ряд критеріїв, що використовуються при синтезі оптимальних законів керування асинхронним електроприводом. Усім їм властивий один недолік: у якості параметра оптимізації виступає один з енергетичних або техніко-економічних показників. Однак вони можуть бути ефективно використані у випадку параметричної оптимізації, коли відома структура системи керування, а задача стоїть у визначенні коефіцієнтів компонент системи, якщо врахувати, що сьогодні існують спеціалізовані пакети прикладних програм, в основі яких лежить процедура випадкового або градієнтного пошуку.
У роботі в якості критеріїв оптимального керування використовуються лінійні комбінації двох або трьох відомих критеріїв. Це дозволяє авторам при рішенні задач оптимального керування враховувати в одному критерії як вимоги до мінімізації енергетичних затрат, так і часу (двохкомпонентний критерій) або зменшення енергетичних затрат, часу процесу керування та покращення динамічних процесів об'єкту керування (трикомпонентний критерій).
Існують й інші критерії. Так, у роботах [9 -10] розглянуто новий підхід до аналітичного конструювання лінійно-квадратичних систем керування або, як їх називають у зарубіжних джерелах, задач лінійно-квадратичної оптимізації. Ці системи керування, на відміну від традиційних критеріїв, синтезуються без урахування конкретного критерію. Однак доводиться, що отримані системи керування завжди забезпечують мінімізацію деякого критерію. Це ж відмічається і в роботі [10], що функціонал, який оптимізує, не обов’язково постулювати. Він може являтися деякою супроводжуючою інтегральною оцінкою якості перехідних процесів. Така властивість притаманна критерію якості в методі аналітичного конструювання за критерієм узагальненої роботи. Складові частини функціоналу є інтегральною оцінкою якості перехідних процесів, точності стабілізації бажаного незбуреного стану, «витрат» керування або енергетичних витрат.
Сьогодні для синтезу оптимальних систем керування нелінійними об'єктами відомий цілий ряд методів.
Одним з найбільш відомих та вживаних методів оптимального керування є принцип максимуму Понтрягіна. Переваги принципу максимуму проявляються там, де можна одразу, по одному виду гамільтоніана H знайти функції, на яких він сягає максимуму. Це можна зробити тоді, коли і функціонали і керування зв’язку або лінійні як відносно керувань, так і відносно фазових координат, або лінійні хоча б відносно керувань. У загальному випадку, який-небудь функціонал, екстремуми якого ми шукаємо, або рівняння зв’язку нелінійні по керуванню U (t), безпосередньо з виду гамільтоніана вже не можна судити про функції U (t), на яких він сягає максимуму.
Основна трудність рішення задач оптимального керування за допомогою принципу максимуму Понтрягіна, як і в методі динамічного програмування, запропонованого Р. Беллманом, полягає в рішенні двохкрапкової крайової задачі.
Відоме також значне число поодиноких методів класичного варіаційного числення, що придатні для вузьких класів задач оптимального керування. Ці методи зручні для рішення задач оптимального керування, де управління шукаються у вигляді гладких або кусочно-гладких кривих, що не містять точок з нескінченними значеннями перших похідних, а також методи аналітичного конструювання регуляторів за критерієм узагальненої роботи (АКУР), де основна трудність пов’язана з визначенням коефіцієнтів функціонала, який оптимізується. Однак в теперішній час цю проблему можна вирішити за допомогою сучасних методів синтезу систем на основі нейромережевих технологій та методів нечіткої логіки.
Останні десять років інтенсивно розвиваються методи синтезу систем керування на основі векторного управління, методів нечіткої логіки, нейронних мереж та нейронечітких мереж [13- 14].
У цих роботах [16−18] з одного боку нечіткі системи керування використовуються для об'єктів управління, модель яких невідома, а з другого — як альтернатива класичним системам керування. Показано, що важливою перевагою нейромережевих систем керування є можливість їхнього навчання на прикладах. Тут же приведено ряд можливих архітектур для побудови нейромережевих систем управління.
Побудова систем векторного керування асинхронними електроприводами розглянуто в ряді публікацій [19−21]. У [19,20] розглянуті загальні принципи векторного управління електроприводами, зокрема, побудова систем векторного керування з використанням стандартних П-, ПІ-, ПІД-регуляторів. Найбільш повно методи застосування сучасних засобів штучного інтелекту (нечіткої логіки, нейронних мереж) в керування електроприводами описані в роботах [21,22]. Однак тут недостатньо уваги приділено питанням побудови моделей систем керування з використанням нечіткої логіки для конкретного типу електроприводу та проведення порівняльного аналізу з відомими системами, що містять стандартні регулятори.
Типова структура модуля нечіткої системи управління приведена на рисунку 1.2.
Рис. 1.2. Структура моделі нечіткої системи керування.
Інформація з об'єкта управління у вигляді чітких значень фазових координат об'єкта управління поступає на блок фазифікації, який на основі чітких значень вхідних змінних формує нечіткі значення відповідних лінгвістичних змінних. Блок виводу на основі правил вигляду:
де — відповідно нечіткі значення вхідних змінних та управлінь, визначає нечіткі управління, які за допомогою блоку дефазифікації перетворюються на вектор чітких управлінь, який впливає на виконавчі пристрої об'єкта керування за метою компенсації зовнішніх впливів ME.
Зазвичай нечіткі системи керування застосовуються у випадках, коли модель об'єкта невідома.
Системи керування на основі штучних нейронних мереж багатьма авторами розглядаються як альтернатива класичним системам керування. У наш час відомий цілий ряд можливих архітектур побудови нейромережевих систем керування [23−24]. Великий інтерес до нейромережевих систем керування пов’язаний з тим, що вони мають ряд корисних властивостей, яких складно досягти за допомогою інших методів. Зокрема, мова йде про робастість систем керування, про визначення управлінь в умовах, коли неточно відома модель об'єкта про більш гнучке реагування на мінливі зовнішні умови та можливість обробки даних різної природи. Можна також відмітити, що для нейромережевих моделей не існує обмежень, пов’язаних з лінійністю системи або видом застосовуваного функціонала. Важливою перевагою нейромережевих систем керування є також можливість їхнього навчання на прикладах.
До істотного недоліку нейромережевих систем управління слід віднести недоступність знань, накопичених в системі та розподілених між усіма нейронами, зовнішньому спостерігачеві. Частково цей недолік подоланий у нейронечітких системах управління, які, з одного боку, використовують нечіткі правила виробки рішень, а з іншого — володіють здатністю до навчання.
В результаті можна відмітити, що виходячи з особливостей розглянутого об'єкта та характеристик методів оптимізації, найбільш доцільно використовувати для розробки системи управління методи нечіткої логіки та методи на основі нейромережевих технологій.
2. РОЗРОБКА МОДЕЛІ СИСТЕМИ КЕРУВАННЯ ЕЛЕКТРОПЕРЕДАЧІ ДИЗЕЛЬ-ПОТЯГУ
2.1. Моделювання тягових двигунів дизель-потягу
Даний розділ присвячено питанням розробки математичної моделі системи керування енергетичної системи дизель-потягу з тяговими асинхронними двигунами та їхній технічній реалізації з використанням комп’ютерних та інформаційних технологій. Серед розглянутих моделей приведені результати розробки моделей тягових двигунів з урахуванням їхнього використання для рішення задач синтезу регуляторів та дослідження об'єкту в цілому, моделей пристроїв формування керуючих впливів для випадків представлення ТАД у нерухомій двохфазній та трифазній системі координат, моделей регуляторів САК, системи керування та їхніх функціональних схем із врахуванням технічної реалізації, результати дослідження моделей та визначення адекватності.
У якості тягового асинхронного двигуна в системі, що моделюється, приймається ідеалізована машина з симетричною системою обмоток статора і ротора, гладким повітряним зазором, синусоїдальним розподілом магнітного потоку уздовж окружності статора і ротора, при роздільному обліку насичення по головному шляху магнітного потоку та по шляхам розсіювання, без урахування ефекту витіснення струму в обмотках ротора та втрат сталі.
Об'єкт дослідження в загальному вигляді може бути представлений системою диференційних рівнянь, що описують електромагнітні процеси ТАД як у прямокутній системі координат б, в, так і в природній (в осях a, b,0).
Математична модель електроприводу у нерухомій прямокутній системі координат у осях б і в описується системою диференціальних рівнянь (2.1), що приведені нижче [26, 27].
(2.1)
де, ,, , , — відповідно проекції на вісі координат б і в потокозчеплення, напруги та струму обмоток статора;
, , — відповідно проекції на вісі координат б і в потокозчеплення та струми обмоток ротора;
, ,, ,
;, ,, , , — постійні коефіцієнти для даного типу ТАД.
Струми, ,, визначаються через потокозчеплення, ,, наступним чином:
;;; .
Момент опору навантаження Мс у залежності від частоти може бути представлений у вигляді лінійної залежності, що визначається виразом:
(2.2)
або нелінійної залежності:
(2.3)
де a0, b0, b1 — постійні величини.
Використання рівнянь у нерухомій системі координат та врахування несинусоїдальної форми напруги живлення ТАД призводить до надмірної громіздкості рівнянь та складності математичної моделі, однак дозволяє проводити дослідження з урахуванням миттєвих значень змінних станів, що в ряді випадків є необхідним при дослідженні явищ, що притікають в системах електропривода. Тому для якісних досліджень на ПЕОМ доцільно використовувати метод огинаючої, запропонований О. О. Булгаковим [27, 28]. При цьому для запису рівнянь використовується система ортогональних осей X, Y, що обертаються синхронно зі швидкістю результуючого вектора напруги (струму) статора. Цей метод годиться для обмеженої області частот, коли пульсаціями швидкості двигуна, які зумовлені несинусоїдальністю напруги, можна знехтувати.
Рівняння асинхронного двигуна в синхронній системі координат X, Y мають вигляд [27, 26]:
(2.4)
де — кутова частота напруги статора двигуна при p = 1;
, ,, , — відповідно проекції на осі X1 та Y1, X2 та Y2 потокозчеплень статора і ротора та напруги живлення; всі інші змінні були описані вище.
Напруги по осям X, Y (функції впливу) визначаються наступними рівняннями для випадку синусоїдальних напруг на статорі двигуна:
= UM cos [(0 — K)t + K],
= UM sin [(0 — K)t + K],
де UМ — амплітуда першої гармоніки фазної напруги на статорі двигуна;
— кутова швидкість обертання осей координат;
— довільна початкова фаза напруги обмотки, А статора.
У випадку синхронних осів за умови, що початкова фаза напруги, функції впливу — це постійна напруга, яка дорівнює UM по осі X, та нульова напруга по осі Y.
Рис. 2.1. Структурна схема моделі в пакеті MatLab.
На рис. 2.1 приведена структурна схема моделі, що реалізує систему рівнянь (2.4) у пакеті MathLab. Вона складається з наступних частин: блока формування сигналів керування (функцій впливів) по амплітуді (Subsystem1) та частоті 0 (Subsystem2); блока інтегрування системи диференційних рівнянь (2.4) у вигляді субблока Object1; блока задавання похідних даних та параметрів ТАД; блока обмеження амплітуди та частоти напруги сигналу керування та ряду допоміжних блоків (перемикачів — Switch); блока, який задає певне співвідношення між амплітудою напруги та частотою (один з таких законів управління U/f = const); блоків відображення інформації.
Вхідними сигналами для субблока моделі Object1 є сигнали, пропорційні керуючим впливам и 0, а вихідними сигнали — потокозчеплення (X1, Y1, X2, Y2), струми (X5 — X8) ТАД та кутова швидкість крутіння ротора двигуна в залежності від моменту навантаження, що визначається моментом інерції J. У математичній та машинній моделях мають місце наступні відповідності:
X1; Y1; X2; Y2.
Змінні X5 — X8 — проекції струмів статорної та роторної обмоток ТАД на відповідні осі координат.
На рис. 2.2 і 2.3 приведені перехідні процеси у вигляді осцилограм, що демонструють роботу моделі при визначених початкових умовах у замкненій системі керування (сигнали керування формуються або згідно до певного закону, наприклад U/f = const, або згідно до заданого закону керування, синтезованого з використанням змінних стану об'єкту). На рис. 2.4 приведені процеси, відповідні сигналу задавання 0 та сигналу, відповідної швидкості обертання ротора ТАД при визначених заданих умовах розгону та відповідних параметрах ТАД, який являє собою деяку інтегральну характеристику розглянутого об'єкта керування.
Рис. 2.2. Залежності X1(t), Y1(t), X2(t), Y2(t).
Рис. 2.3. Залежності X5(t), X6(t), X7(t), X8(t).
Рис. 2.4. Залежності 0(t), (t).
Ряд експериментів, проведених з моделлю, підтвердили її адекватність, що й дозволило зробити висновок про те, що запропонована модель в осях X, Y, 0 може бути використана для проведення досліджень та синтезу керуючих впливів у вигляді амплітуди і частоти напруги живлення ТАД. Крім того, вона може бути використана для уточнення структур САК, що вже маються, та розробки структур САК на основі синтезованих законів керування згідно заданих критеріїв якості, а також визначення та уточнення параметрів САК по результатам досліджень. Особливо вона корисна для попередньої оцінки параметрів регуляторів, які синтезуються для системи керування.
Для проведення комплексних досліджень синтезованих систем управління може бути використана модель ТАД у фазних координатах a, b, 0 зі врахуванням насичення, яка представлена у вигляді системи рівнянь:
(2.5) ,
де — відповідно потокозчеплення, напруга та струм фаз a та b статора;
— потокозчеплення та струм обмоток фаз a та b ротора;
— модуль вектора струму, який намагнічує;
— електромагнітний момент ТАД.
Відповідність вище приведених параметрів між собою має вигляд:
;; ;; ;; ;; ;; ;; ;
.
Математична модель ТАД, що представлена у вигляді рівнянь (2.5), більш складна, ніж моделі вигляду (2.1) і (2.4), оскільки тут ряд параметрів є постійними величинами, як у попередніх моделях, а являють собою функції модуля вектору току, що намагнічує.
Аналіз моделей, що задані системами рівнянь (2.1) — (2.5), показує, що в залежності від мети досліджень, кожна з них може біти використана для визначення керуючих впливів.
Аналіз різних форм запису показує, що для моделювання безпосередньо двигуна та механізму, без урахування властивостей джерела живлення (приймаємо його джерелом ЕРС), найбільш проста модель виходить при запису рівнянь двигуна в рухомій системі координат в осях X, Y через потокозчеплення. Моделювання ТАД як у прямокутній системі координат, , так і у природній (в осях a, b,0) доцільно використовувати для дослідження об'єкту керування у замкненій системі регулювання з урахуванням протікання електромагнітних процесів.
2.2. Моделювання пристроїв САК об'єкта керування
Електропередача дизель-потягу має автономну систему автоматичного керування, яка здійснює спільну роботу з дизелем та забезпечує керування тяговими асинхронними двигунами для реалізації тягових характеристик у всьому діапазоні швидкостей та навантажень. У електропередачі, що досліджується, використовується САК, яка забезпечує формування амплітудного значення напруги живлення та частоти тягових асинхронних двигунів. В електропередачі дизель-потягу САК виконана двоконтурною. Перший контур здійснює регулювання збудження тягового генератора та задає величину напруги, яка підводиться до двигунів. Він забезпечує стабілізацію струму асинхронних двигунів при пуску та регулювання струму та напруги генератора в зоні дії обмеження по напрузі дизеля. Другий контур регулювання є підлеглим по відношенню до першого, він здійснює регулювання частоти живлення тягових двигунів.
Для розробки моделей пристроїв САК використані структурна схема системи керування та функціональні схеми каналів регулювання окремих компонентів енергетичної системи дизель-потягу.
Структурна схема системи управління електропередачі дизель-потягу приведена на рис. 2.5.
При дослідженні САК об'єкта керування практичний інтерес являють математичні моделі регуляторів тягового генератора та електропривода з метою формування керуючих впливів по каналу напруги та частоти.
Рис. 2.5. Структурна схема системи керування електропередачі дизель-потягу.
До першого контуру САК електропередачі відноситься регулятор тягового генератора (РТГ), який призначений для формування сигналу керуючого впливу по збудженню тягового генератора UУГ. В якості вхідних сигналів для РТГ використовуються напруга, пропорційна частоті тягового генератора UfГ; напруга обмотки збудження UВ; струм мостів випрямлювачів IОТ; напруга задавання UЗГТ; активні струми Id1, Id2 кожного ТАД; напруга генератора UГ.
Формування сигналу UУГ з урахуванням забезпечення динамічних показників системи здійснюється шляхом включення у контур регулювання пристроїв, які функціонують згідно до певних алгоритмів, що реалізують відповідні закони управління, такі як пропорційний, інтегральний, пропорційно-інтегральний або більш складні, якщо не можна досягти заданих показників якості шляхом застосування одного з названих алгоритмів.
У САК електропередачі дизель-потягу для формування сигналу керуючого впливу по збудженню тягового генератора UУГ, як один з можливих варіантів, може бути використаний пропорційно-інтегральний закон управління. Математична модель регулятора збудження може бути представлена у вигляді:
(2.6)
(2.7)
(2.8)
UЗГ = UЗГ2 — UУВ = K9 + K7UfГ — UУВ, (2.9)
UfГ = fГ, (2.10)
UЗВ = K8UfГ +, (2.11)
UУВ = K6(UЗВ+ UВ), (2.12)
UВ = UВГ, (2.13)
де K1 — K10 — коефіцієнти підсилення;
Т1 — Т5 — постійні часу інтегрування;
р — оператор Лапласа;
UЗГ2 — сигнал керування, що здійснює обмеження максимальної напруги тягового генератора.
Значення UЗГ1 формується з використанням блоку задавання інтенсивності, що забезпечує темп наростання відповідного сигналу в перехідному режимі. Величина T3 визначається з умови:
T3 = T31 при UЗГ1 UЗГ;
T3 = T32 при UЗГ1 > UЗГ,
де Т31, Т32 — постійні часу інтегрування, що визначаються в процесі досліджень.
За допомогою сигналу управління UУВ здійснюється обмеження максимального значення напруги збудження тягового генератора.
Коефіцієнти передач К2, К3 та постійні часу Т2, Т3 визначаються в процесі досліджень. При цьому значення постійної часу Т3 (блок задавання інтенсивності), як правило, має різні значення при «накиданні» та «скиданні» сигналу UЗГ, який на нього поступає.
З метою визначення структури та параметрів регулятора вихідної напруги інверторів електроприводу, його модель може бути представлена сукупністю моделей каналу струму Ig та каналу потужності РГ.
Ці канали призначені для формування сигналу керуючого впливу UУШ по вихідній напрузі інверторів.
Математична модель регулятору вихідної напруги інверторів електроприводу каналу струму Ig в режимі без урахування процесів буксування може бути представлена у вигляді:
=, (2.14)
(2.15)
= KIg, (2.16)
=, (2.17)
UG =, (2.18)
IYG =K8UG, (2.19)
= IYG, (2.20)
де Кi (i = 1, 10) — коефіцієнти підсилення;
Тj (j = 1, 4) — постійні часу (Т1 -постійна часу блоку задавання інтенсивності);
— вихідний сигнал низькочастотного фільтру, що встановлюється на виході ПІ-регулятора;
KIg— вихідний сигнал ПІ-регулятора каналу струму;
— сигнал, пропорційний струму навантаження ТАД;
IYG — вхідний сигнал формувача зворотного зв’язку по каналу струму;
UG — сигнал, який відповідає ефективному значенню напруги живлення ТАД.
Співвідношення (2.15) описує модель регулятора каналу обмежувача струму (канал Ig), використовуючи при цьому пропорційно-інтегральний закон керування. При проведенні досліджень не виключається використання також інших законів керування.
Формування сигналу задавання UЗТ здійснюється на основі використання сигналу, пропорційного номеру позиції контролеру машиніста, з встановленням певного темпу його наростання.
Математична модель регулятора вихідної напруги інверторів електроприводу каналу потужності PГ у режимі тяги може бути представлена у вигляді:
= K2W (p), (2.21)
W (p) =, (2.22)
=, (2.23)
IУМ =, (2.24)
= IУМUУГ, (2.25)
де Кi (i = 2, 6) — коефіцієнти підсилення;
Тj (j = 1, 2) — постійні часу (Т1 -постійна часу блока задавання інтенсивності);
UУШ — сигнал керуючого впливу по вихідній напрузі інверторів;
— вихідний сигнал регулятора каналу потужності;
— сигнал, пропорційний вживаній потужності ТАД;
UУГ — сигнал, пропорційний напрузі генератора;
IУМ — вхідний сигнал формувача зворотного зв’язку по каналу потужності;
b1, b2 — постійні коефіцієнти;
Т — постійна часу блока задавання інтенсивності.
Формування сигналу задавання UЗМ здійснюється на основі використання сигналу, пропорційного номеру позиції контролеру машиніста, з установленням визначеного темпу його наростання.
На основі розробленої моделі уточнена структура САК каналу обмеження струму, визначені значення параметрів регулятора вихідної напруги з урахуванням забезпечення вимог до якісних показників перехідного процесу (величини перерегулювання, часу регулювання, числа коливань) [2−106]. Результати досліджень регулятора вихідної напруги (канал обмеження струму) при різних коефіцієнтах підсилення К4 приведені на рис. 2.7, де процеси 1−5 (криві перехідних процесів струму навантаження ТАД) відповідають коефіцієнтам підсилення К4, відповідно: 0.2; 0.3; 0.4; 0.5; 0.6.
Рис. 2.6. Структурна схема моделі регулятора вихідної напруги.
Рис. 2.7. Результати моделювання з різними коефіцієнтами підсилення К4.
Рис. 2.8. Результати роботи ланки корекції.
На рис. 2.8 приведені результати моделювання (криві перехідних процесів струми навантаження ТАД) скоректованої системи регулювання, що забезпечує виконання необхідних вимог до якісних показників перехідного процесу регулятора вихідної напруги інверторів. Крива 1 — перехідний процес струму навантаження ТАД без урахування корекції; крива 2 — з урахуванням корекції.
2.3. Розробка моделі блоку «синхронний генератор-випрямлювач» електропередачі дизель-потягу з використанням нейронних мереж
Аналіз і синтез систем керування складними енергетичними об'єктами, до яких відноситься електропередача дизель-потягу з асинхронним тяговим електроприводом, нерозривно пов’язані з питаннями створення їхніх моделей з метою проведення комплексних досліджень, а також уточненням структури та параметрів пристроїв для розробки.
Питанням моделювання окремих блоків системи керування електропередач потягів присвячено значне число робіт. Однак традиційні підходи викликають труднощі при вирішенні вказаних задач. Тому постійно йде пошук у напрямку створення моделей на основі досягнень сучасних комп’ютерних технологій рішення цих задач, зокрема нейромережевих технологій. Однією із задач при вирішенні цих проблем є адаптація відомих архітектур нейронних мереж для побудови моделей компонентів структури САР енергетичної системи дизель-потягу.
У нашому випадку об'єктом моделювання є блок «синхронний генератор-випрямлювач». Його моделювання виконаємо за допомогою нейронних мереж.
Математичну модель блоку «синхронний генератор-выпрямитель» можна представити сукупністю моделей синхронного генератора (СГ) і випрямлювача (У).
Відповідно до загальноприйнятих допущень математичну модель СГ, що представляє собою ідеалізовану явнополюсну синхронну машину, яка має на роторі обмотку збудження і по одному короткозамкненому контуру в подовжній і поперечній осях, у координатній системі d, q можна представити наступною системою диференціальних рівнянь (2.26):
;
;
; (2.26)
;
Де — відповідно потокозчеплення та струми обмоток: статора (по осям d і q), збудження і демпферних (по осям d і q);
— активні опори обмоток статора, збудження та демпферних (по осям d і q);
— кутова частота обертання ротора.
Облік насичення магнітного кола в явнополюсних синхронних машинах зазвичай вироблятися тільки по подовжній осі. Для цього у вираженнях для потокозчеплень індуктивний опір реакції якоря по подовжній осі представляють як функцію подовжньої складовий потокозчеплення в повітряному зазорі. У цьому випадку вираження для потокозчеплень контурів синхронної машини по подовжній осі мають наступний вид:
; (2.27)
; (2.28)
; (2.29)
; (2.30)
(2.31)
де — відповідно опори розсіювання обмоток статора, збудження та демпферної по осі d;
— опір реакції якоря подовжній осі (2.31).
У результаті рішення системи рівнянь (2.26) з урахуванням виразів (2.27)-(2.31) визначаються струми статорної обмотки по осям d і q — і. Фазні струми СГ, що являються впливом, яке задає, для математичної моделі некерованого трифазного випрямлювача, знаходяться за допомогою лінійних перетворювань:
; (2.32)
; (2.33)
; (2.34)
(2.35)
де — значення кута при t = 0.
Напруга обурення і визначається згідно до виразів:
; (2.36)
(2.37)
де — фазні напруги СГ, одержувані за допомогою перетворювача, що формує ці напруги на основі фазних струмів СГ.
Реалізація математичної моделі, заданої системою диференціальних рівнянь (2.26) і рівняннями (2.27) — (2.37) з використанням сучасних пакетів прикладних програм, наприклад пакета MATLAB, не викликає особливих труднощів. Вона зводиться до побудови структури моделі з наявної бібліотеки блоків пакета і розрахунку параметрів моделі.
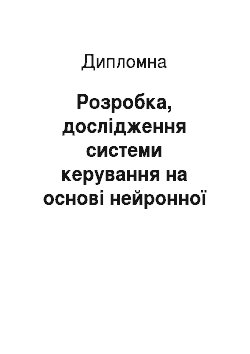
У ряді випадків моделювання блоку «синхронний генератор-випрямлювач» можна здійснити, використовуючи його навантажувальні характеристики, представлені на рис. 2.9.
Здатність штучних нейронних мереж, навчених на деякій множині даних, видавати правильні результати для досить широкого класу нових даних є дуже вагомим аргументом для побудови моделей різних систем. У даному випадку ця властивість нейронної мережі підходить для створення моделі блоку «синхронний генератор-випрямлювач «за навантажувальними характеристиками. При цьому робота моделі полягає в наступному: на вхід подаються струми збудження (формування струму збудження розглянуто в розділі 2.2) і навантаження, на виході повинне формуватися випрямлена напруга, значення якої відповідає графікам навантажувальних характеристик (рис 2.9.) Причому мережа повинна працювати не тільки на тренувальних шаблонах, але і виконувати поставлену задачу на всіх припустимих значеннях вхідних сигналів.
Рис. 2.9. Навантажувальні характеристики СГ.
Для побудови моделі обрана багатошарова нейронна мережа прямої передачі сигналів із двома нейронами у вхідному шарі (кількість входів), двома схованими шарами й одним нейроном у вихідному шарі. Для нейронів схованих шарів використовувалися нелінійні сигмоїдальні функції активації нейронів.
У результаті моделювання знайдене оптимальне число нейронів для першого і другого схованих шарів мережі, відповідно 10 і 15 нейронів. Для навчання мережі використовувалися дані рис. 2.9.